- 回首頁
- 機械工業雜誌
整車控制器訊號級功能與失效模擬驗證技術
作者 黃彥翔
刊登日期:2019/02/01
前言
隨著科技的進步與電動車輛的發展,車載電子零件日益複雜且在車輛中扮演重要的角色,車輛上各種智慧化之功能皆仰賴車上不同之電子控制器(Electronic Control Unit, ECU)。在電動化之車輛上,整車控制器(Vehicle Control Unit, VCU)扮演著重要的角色,亦如車輛的大腦般掌控整車各個不同次系統間之協調運作,因此,車上各個控制器間之聯絡溝通管道之重要性不言而喻。本研究主要以訊號級之虛擬驗證平台進行車載通訊網路(Controller Area Network, CAN)之失效驗證。目標為工研院電動商務車(CPEV)之整車控制器與馬達控制器間的溝通網路,模擬控制器間訊號溝通網路異常與失效並驗證控制器對應之策略設計。
硬體在環驗證技術
隨著全球暖化等各項環境議題日漸受到重視,各國政府皆致力於發展綠色能源、相關環保技術與設施等,而在碳排放方面,燃油車一直是主要之汙染來源之一,因此世界先進車廠早已著手開發車輛電動化之技術,並且發展出各式油電混合車與純電動車等低排放車輛,可望有效改善燃油車對於環境的負面影響。隨著車用電子之重要性與複雜度與日俱增,初期的控制系統整合驗證能大幅提升設計品質與開發效率。工研院近年來致力於建立虛擬驗證平台,讓車輛控制系統於設計開發初期透過虛擬環境進行參數調校,甚至進行失效情境驗證。本研究主要透過虛擬驗證平台針對電動商務車之整車控制器與馬達控制器( Motor Control Unit, MCU)間之溝通網路進行驗證。
即時模擬模型
本研究將運用虛擬驗證平台針對整車控制器與馬達控制器進行控制器通訊驗證。透過硬體迴路(Hardware-in-the-Loop, HiL)平台建置一虛擬環境讓控制器運作於其中,而硬體迴路平台運行一即時模擬模型以計算產生控制器運作所需之各項訊號。本研究為驗證整車控制器與馬達控制器間之溝通網路,故模擬模型包含電池模型、傳動系統模型與整車模型等,以對應整車控制器之車速、電壓與其它次系統等訊號接口。為對應馬達控制器之三相電流、脈衝寬度調變(Pulse Width Modulation, PWM)控制訊號與解角器(Resolver)等訊號,故模擬模型包含電機與絕緣柵雙極電晶體(Insulated Gate Bipolar Transistor, IGBT)等即時物理模型以計算並回饋高動態之電力電子訊號給馬達控制器。虛擬驗證平台與整車控制器之介面如圖1所示。
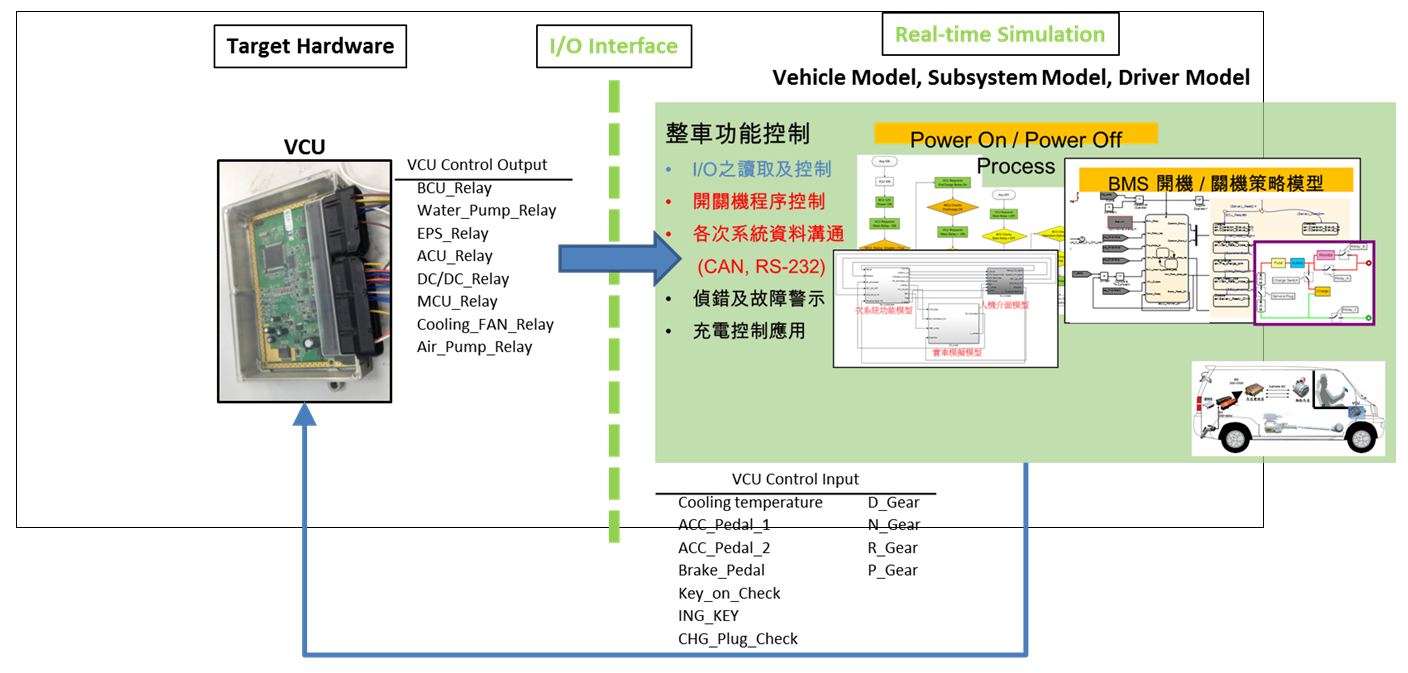
圖1 整車控制器(VCU)與虛擬驗證(HiL)平台之訊號介面
失效注入模型架構
本研究為進行溝通網路訊號之失效注入驗證,將車上原本聯結於同一溝通網路(CAN Bus)之整車控制器與馬達控制器分別安裝於兩條獨立之CAN Bus上,並將此兩條獨立之CAN Bus聯接至虛擬驗證平台,透過虛擬驗證平台將整車控制器與馬達控制器間之溝通資訊進行篩選與轉發,如此當網路訊號失效注入時,可透過虛擬驗證平台將模擬之失效訊號傳送至對應的控制器,而不影響其它控制器。
回文章內容列表更完整的內容歡迎訂購 2019年02月號 (單篇費用:參考材化所定價)
主推方案
無限下載/年 5000元
NT$5,000元
訂閱送出