- 回首頁
- 機械工業雜誌
摘要:本研究開發一多軸同步 (Synchronized) 體感平台結合虛擬實境 (Virtual Reality, VR),其主要透過互動科技、空間定位、觸覺模擬與情境感測等技術來建立出完整的VR多軸體感系統。此多軸同步體感平台具備雙軸腳控器及單軸轉向桿,平台由三組曲柄連桿來支撐平台機構。使用Visual Studio C# 語言建立運動系統的控制機制,經由EtherCAT (Ethernet control automation technology) 的通訊傳輸配合多組伺服電動機與運動控制卡來驅動平台,而針對運動平台控系統響應的優化部分,導入Cascade法則設計了控制器PI參數,與Auto-tuning計算參數做響應比較,在時域系統中做速度環與位置環的步階響應模擬以及實驗;在頻域系統中模擬電動機頻寬,驗證本研究設計參數對響應的提升,使曲柄連桿機構可以實現多軸同步體感平台複合運動之控制。
Abstract:This study develops a Virtual Reality (VR) images combining with a multi-axis synchronous motion-sensing platform for medical rehabilitation education and entertainment purpose. The concept is integrated into interactive technology, spatial position, tactile stimulation, and scenario sensing to build a complete system of multi-axis VR sensing rehabilitation mechanism. A real single-axis foot controller and two-axis steering rod were installed on a synchronous motion-sensing rehabilitation platform. The link mechanism consists of three crank linkages below the platform. Using the Visual Studio C# language and EtherCAT communication transmission with the motion control card was utilized to establish the motion control system. To enhance the response of the system, the cascade rule is imported to design PI controlling parameters. Compared with Auto-tuning, the step response simulation and experiments of velocity loop and position loop were tested in time domain. The response and motor bandwidth were improved effectively with parameters designed by Cascade rule. And the multiple sets of servo motors and crank links mechanism were driven by this system with this complex synchronous motion.
關鍵詞:多軸同步體感平台、虛擬實境、伺服電動機
Keywords:Multi-axis synchronous motion-sensing platform, Virtual reality, Servo motors
前言
近年來臺灣的醫療技術發展快速,且擁有世界數一數二的健保制度,人們能使用良好的醫療資源,人們的平均壽命一直直線上升,高齡化社會問題漸漸浮出表面,老年人由於生理與身體機能退化的問題,導致無法隨意出外活動,故醫療輔具或復健平台等醫療科技備受矚目。
傳統醫療機構中的醫療輔具由於缺乏真實感,故老年人進行復健或相關治療時,常會感到枯燥乏味,長久下來會造成復健意願降低,而利用史都華平台 (Stewart) 裝置能提供多種運動狀態,進而產生更加真實的體感,使得老年人有更多復健上的樂趣及真實感從而提高復健意願。
並聯機構的早期設計由Gough和Whitehall [1]提出,它為一套六線性千斤頂系統用於輪胎試驗機。後來Stewart [2]為飛行模擬器提出了一個擁有6自由度(Degree of freedom, DoF)Stewart平台。 Hunt [3]認為這些並聯式機構相較於傳統串聯式機構,有更好的剛度和精確的定位能力。從那以後,此系統常被許多研究人員用於各種應用[4-7]。此外,3 DoF並聯機構已被廣泛研究。 其運動系統相較Stewart平台更容易達到重量平衡,可以減少大量的電源和控制系統的成本。故在最近的許多應用中,常利用3 DoF運動系統代替6 DoF [8]。 3 DoF並聯機構被廣泛應用於定位系統和加工,並已通過多種類型的研究[9,10]驗證。 3 DoF旋轉運動平台用於指向或定向任務,如電視衛星天線,太陽能反光鏡,攝像機定向裝置,飛行和駕駛模擬器 [11,12]。此外,3 DoF並聯機構運動平台也常用於遊戲機或虛擬現實劇場[13]。
而為了提供更加真實的體感,加入虛擬實境技術為唯一解決方案。而虛擬實境技術可以回朔到1957年, Morton Heilig 開發了一個稱為「Sensorama」的大型機械裝置,此裝置可同時進行視覺、聽覺、嗅覺以及觸覺體驗,成為 VR 技術和電影製作人的先驅 [14],Ivan Edward Sutherland等人於研究出世界上第一個 VR 及擴增實境頭戴式顯示器系統,但由於此頭戴式顯示器過於沉重,只能將其懸掛在天花板上使用;Jaron Lanier 於 1985 年創辦 VPL Research 公司研究多種虛擬現實裝置,並開發出第一個頭戴式可視裝置(Head mount display, HMD)EyePhone 和觸覺輸出裝置資料手套,有了 VPL Research 公司的推廣使 VR廣為人知,並持續發展成現今的 VR 影像與頭盔顯示器。而台灣現今針對此方面的發展越來越重視,如何有效的利用虛擬實境來達到更多的應用,是最重要的,而本研究中結合了動感平台機構,將平台的運動與虛擬實境之及時同步控制,為了建立一個能夠完整實現體感的運動平台的伺服控制系統,並與虛擬實境之結合,本文介紹平台系統為了達到上述成果,從伺服系統模擬、控制系統架設、虛擬實境場景建立及系統整合進行描述,並讓讀者能對多軸動感平台與虛擬實境結合之系統架構有更深入的了解。
多軸動感平台控制系統
多軸動感平台的主要目的是為了提升虛擬實境的真實感及沉浸度,使用Simulink模擬軟體進行閉路伺服控制系統參數設計,主要希望能使系統響應速度與虛擬實境有即時同步之功效,藉此提升系統真實度及穩定性,而伺服控制系統基本組合架構,通常包含上位控制器 (Master controller)、致動器 (Actuator) 、感測器 (Sensor) 與受控體 (Slave plant) 等部分,圖1為一俱備控制器、致動器、受控體與感測器所形成之閉路系統控制方塊圖。
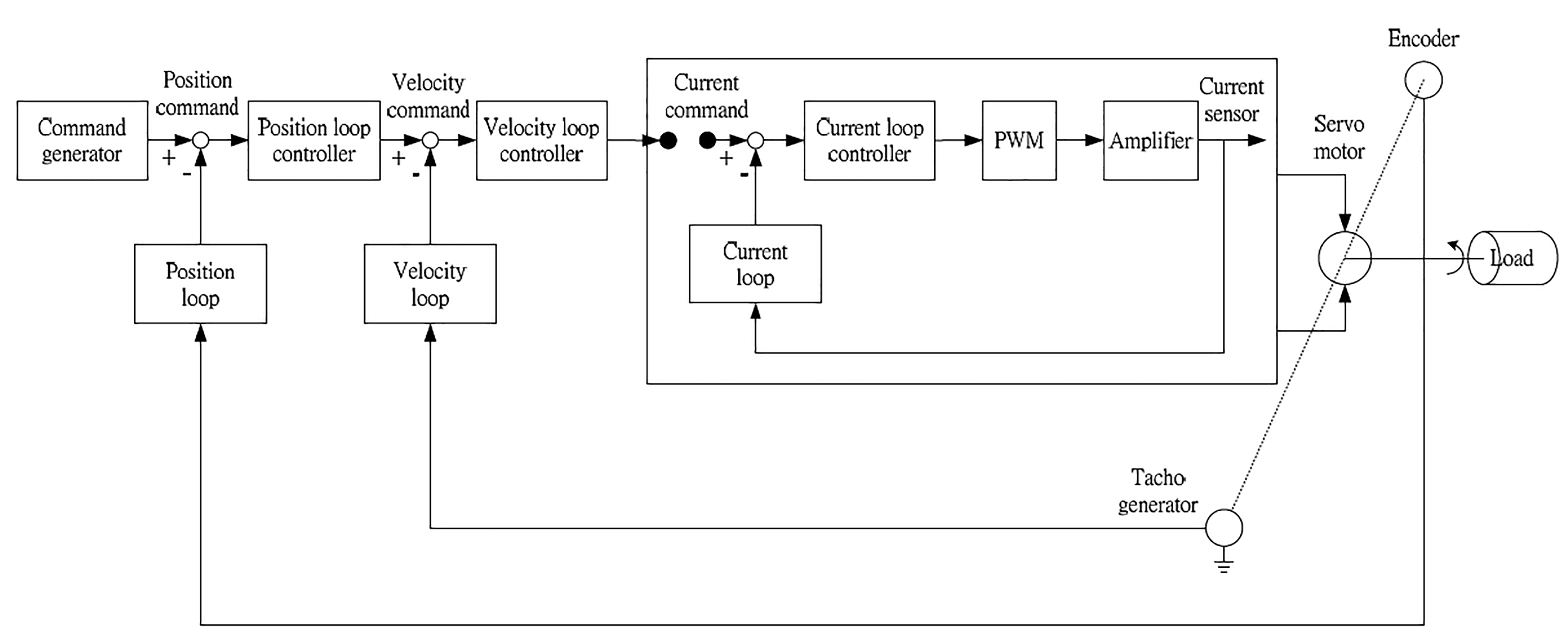
圖1 閉路控制系統方塊圖
系統中架設控制系統,建立虛擬實境場景,最後進行機電整合,達到即時同步控制的目的。
回文章內容列表更完整的內容歡迎訂購 2019年05月號 (單篇費用:參考材化所定價)
主推方案
無限下載/年 5000元
NT$5,000元
訂閱送出