- 回首頁
- 機械工業雜誌
摘要:自適性車頭燈系統為跨入智慧車的第一步,然目前國內研發技術仍落後國外大廠,迫使國內業者需重新思考智慧車輛之全球佈局策略。在本文中將介紹自適性車頭燈系統之概念、光學設計需求及專利分析,並提出一種準直光源設計使LED光源可從60度發散角整束至2度以內,以滿足自適性遠光燈之配光及抑制眩光之需求。
Abstract:The development of Adaptive Driving Beam (ADB) System is the first step to develop a smart vehicle. However, domestic ADB technology still lags behind high-end foreign manufacturers. This situation forces domestic companies to reconsider the global strategy in smart vehicle. This article introduces the concept of ADB system, the requirements of optical design in illuminating system, and the patent analysis results. Furthermore, we proposed a collimated illuminating system that can narrow the light source’s distribution from 60 degrees to 2 degrees. The system allows to meet the needs in light beam distribution and glare elimination requirements for ADB system.
關鍵詞:先進駕駛輔助系統、頭燈、影像感測
Keywords:Automotive advanced assistance system, ADAS, Headlight, Image sensing
前言
車燈被喻為汽車的眼睛,是集照明、信息及外觀等功能為一體的汽車關鍵零組件;對汽車的實用性、安全性和外觀有其重要的地位,因此,在每一款車型的問世或換代改型時,都需要設計開發新的車燈。根據Yole的市場報告指出,車燈規模會由2016年的257億美元成長,預計2022年成長至359億美元,合計2016~2022年全球汽車照明市場規模年複合成長率約為5.7%;然而目前全球前五大製造業者,均為歐美日大廠所掌握,針對台灣業者而言,其關鍵技術仍落後國外大廠,只能藉由「技術進口」為主要的經營模式。綜觀整車車燈系統而言,車頭燈為最主要的技術指標;主要原因為高研發技術門檻、法規嚴格及驗證時程長等因素,因此,需大量的人力及資金投入,造成國內業者只能望之卻步,這無疑地使國內業者需重新思考未來轉型的經營策略。
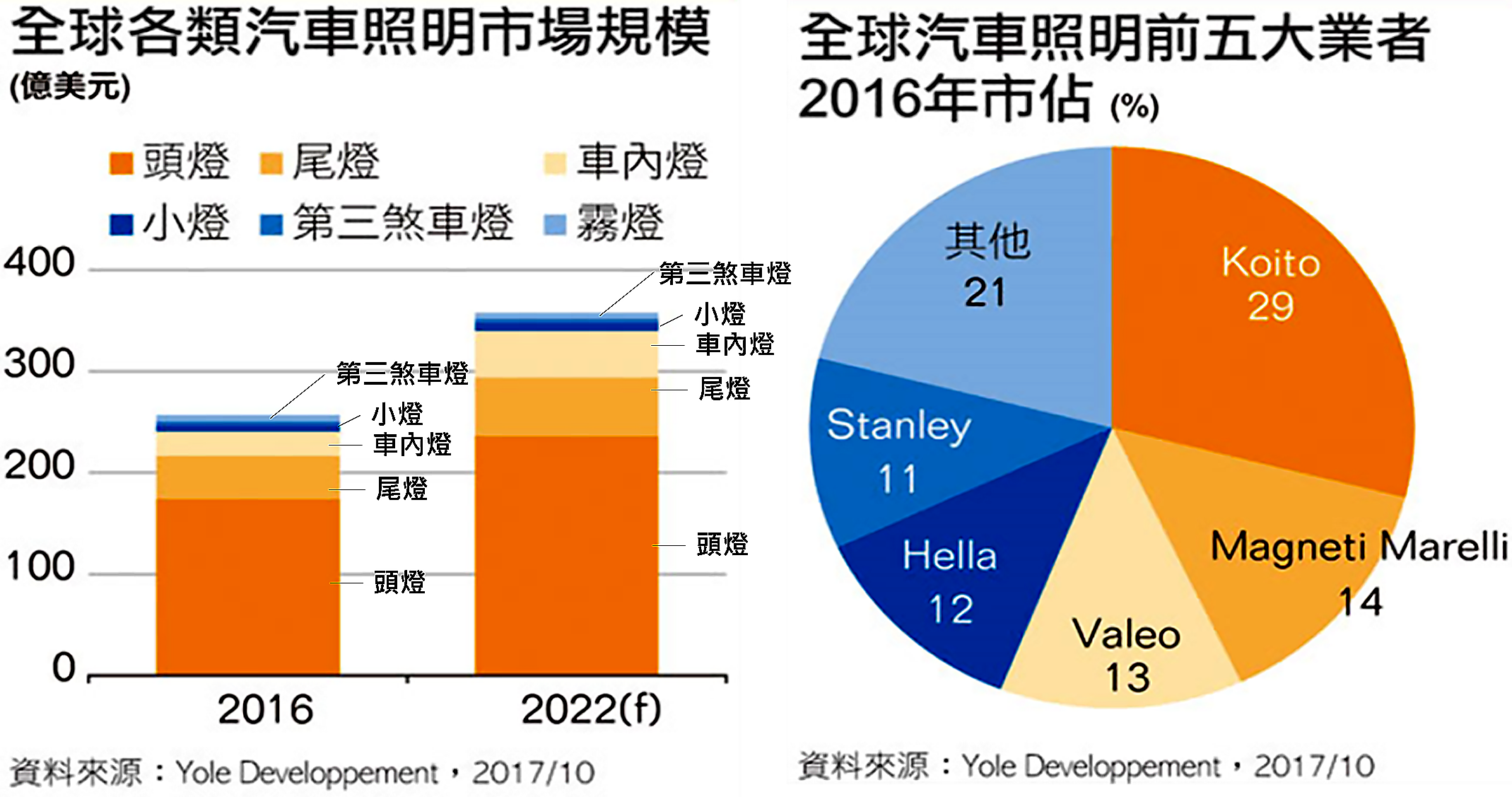
圖1 車燈系統全球市場規模[1]
車燈未來需求及技術演進
車頭燈技術不斷革新,象徵著其評判及需求,已經不局限於照明單一指標;針對車頭燈本身的能耗、設計及駕駛輔助…等功能,都需納入考量範圍,其中,先進駕駛輔助系統(Advanced Driver Assistance System, ADAS)之需求,儼然成為未來車頭燈主要的市場利基點,也成為近年來各家大廠商關注的焦點。
自適性車頭燈(Adaptive Driving Beam, ADB)架構為未來跨入智慧車需求的第一步,透過智能感知手段,以實現車頭燈智慧照明決策,包含自動大燈、彎道輔助、動態轉向及動態調節等功能,進而創造「智慧照明帶來優質安全」之願景。就適用情境來看可描述如圖2所示。在對向來車的情境下,可偵測來車位置並調整遠光燈光束,以達防眩光功能;而在偵測行人的情境下,可適時調製光束光型,進而友善其他用路人。
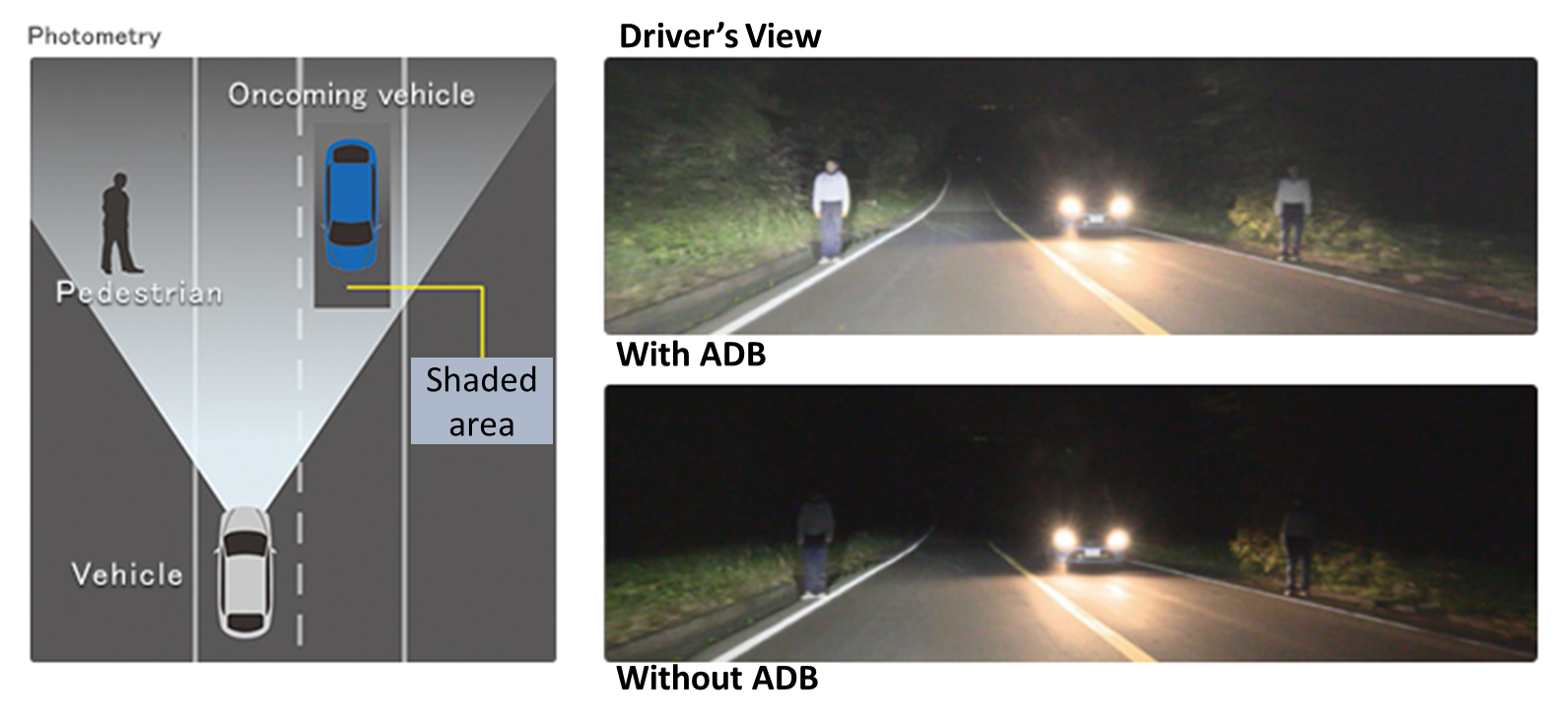
圖2 自適性車頭燈系統適用情境[2]
自適性車燈系統原理及車燈光學需求
1.自適性車燈系統作動原理
自適性車燈系統藉由鏡頭偵測行車時實際路況,並根據駕駛車輛與外部車輛、行人、及道路情形之相對關係,調整汽車頭燈遠光束配置,以減少其他駕駛者、行人及駕駛者本身受到眩光干擾,影響駕駛安全。因此,為實施自適性車頭燈概念,車燈系統可區分成三個主要區塊:鏡頭取像及影像辨識、智慧決策及車燈控制、陣列式遠光燈配光等。其對應的具體情境如下圖說明,首先由鏡頭取像後藉由影像辨識;接著識別前車所在範圍,如圖中介於畫面中紅線及綠線之間;最後在完成前車判定後,對應輸出遠光燈調控模式及其電訊號控制,經由電訊號驅動燈板,進而達到遠光燈光束切換之目的。
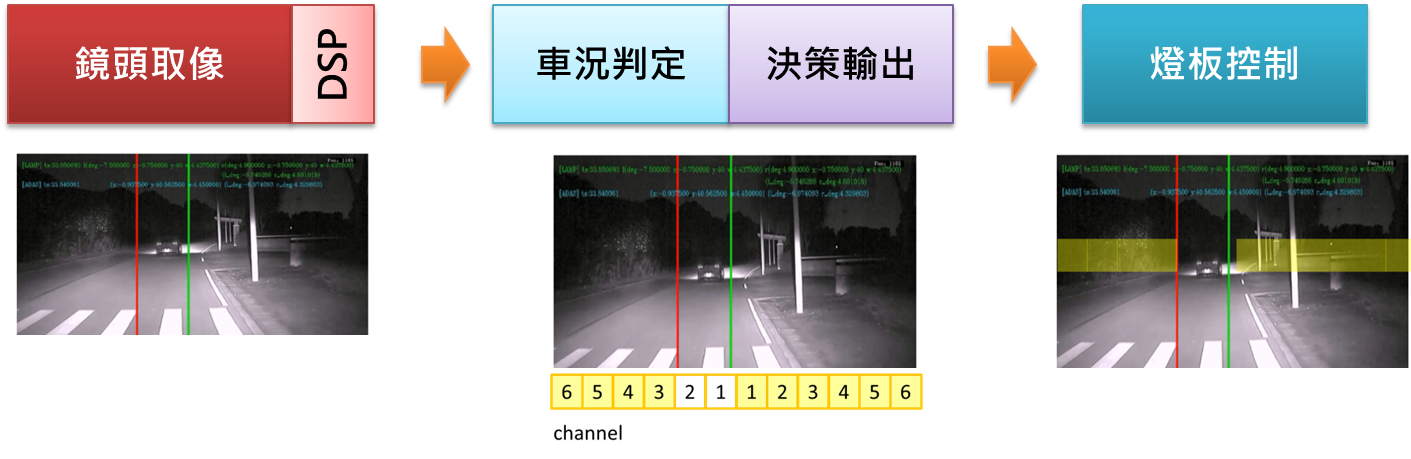
圖3 ADB執行流程
2.自適性車燈光學需求
根據上述的作動流程來進行分析,可得知為了有效實施分區光束控制,須將遠光燈模組配置成陣列可控制形式。陣列中每一子遠光束,需提供特定方向及特定立體角之照明範圍。在四車道寬度定義下,整體配光範圍約為±15度,並再細分成12個照明區域,因此可推算出投射至每一特定區域之發散角須小於2.5度。
回文章內容列表更完整的內容歡迎訂購 2019年09月號 (單篇費用:參考材化所定價)
主推方案
無限下載/年 5000元
NT$5,000元
訂閱送出