- 回首頁
- 機械工業雜誌
| 工基專欄 | 電動巴士高功率驅控器設計與驗證
作者 黃嘉偉、王裕龍、吳世翔
刊登日期:2020/04/01
前言
因應世界環保趨勢,期望達到未來零排放的標準,大眾運輸中最適合推動及被市場接受為電動巴士,本文依據電動巴士整車驅動性能需求,設計開發與驗證高功率密度永磁同步馬達驅控器,並將開發之驅控器整合於實際電動巴士,完成一千公里道路實際測試。
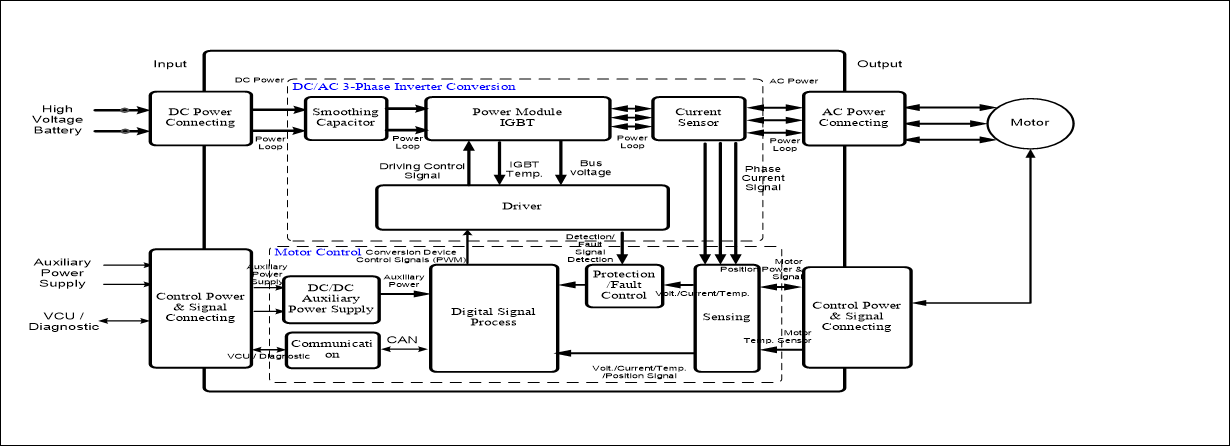
永磁同步馬達驅動控制系統主電路用以控制250kW永磁同步馬達,此馬達驅動器外部接線有直流/交流電源連接線與控制/訊號連接線,驅動器內部可分為數位控制器電源供應電路、類比數位輸入電路、角度信號擷取轉換電路、保護電路、數位通信電路、靜電保護電路、錯誤指示燈電路、車體訊號監控電路、閘極驅動版電路與連接板電路,其架構如圖1所示。
驅控器軟體設計的細節可分為馬達控制模組、驅控器錯誤診斷模組、驅控器錯誤處理模組及車用通訊模組。馬達控制模組是以FOC為主之架構並加入適當之功能以滿足電動巴士之需求,控制演算回路可分為電流命令產生器、電流控制器、角度控制回授、電流回授、解偶合計算與電壓調整等區塊組成。馬達磁場導向控制流程為接收VCU目標轉速、扭力和操作模式,並經由電流命令產生器計算id*和iq*控制命令,本文電流命令產生器採用查表法實現,將目標轉速和扭力輸入後可得到對應之id*和iq*控制命令, id與iq直流回授命令為電流回授區塊取得硬體電路定子輸入電流ia、ib和ic進行Clark與Park座標轉換,即可得到id與iq直流回授命令。並將id*和iq*控制命令與id和iq直流回授命令進行電流控制器處裡後經由比例-積分控制器產生Vq、Vd控制命令,然而將產生之Vq、Vd控制命令經由解偶合及電壓調整區塊進行Inverse Clark轉換及Inverse Park換並加入三次諧波計算後產生SVPWM脈衝控制輸出至硬體電路,可得到新的Va、Vb和Vc 電壓與ia、ib和ic電流完成閉迴路馬達控制。錯誤診斷模組進行驅控器硬體/軟體錯誤診斷,一旦發生錯誤及透過錯誤處理模組進行降載、停機或相對應保護措施,並透過車用通訊模組與電動巴士進行資訊溝通傳遞。
電動巴士動力系統透過動力機進行設計驗證,測試驅控器驅控馬達最高轉速至2900 rpm,馬達轉折點轉速600 rpm以前均有最大輸出扭力3000 Nm,馬達轉速80 0rpm時驅控器直流輸入/交流輸出最大功率分別為250 kW與240 kW,馬達輸出最大功率達到219 kW。測試中馬達最高效率為96.6%在1000 rpm輸出扭力700 Nm,驅控器最高效率為97.3%在馬達轉速1200 rpm輸出功率119 kW。驅控器通過環境測試項目包含防水防塵(IP65)、溫度梯度、振動測試、輻射干擾(RE)、輻射耐受(RS)、大電流注入等測試如圖2所示。實際整車道路驗證將電動動力系統整合至12米電動巴士,完成實際道路測試包含市區道路、快速道路、郊區山線道路
回文章內容列表更完整的內容歡迎訂購 2020年04月號 (單篇費用:參考材化所定價)
主推方案
無限下載/年 5000元
NT$5,000元
訂閱送出