- 回首頁
- 機械工業雜誌
摘要
本論文研究無人機之驅動策略並且提出新的幅值調變驅動方式,主要分為三部分:一為解決無人機所用之直流無刷馬達運作頻率接近微控制器之運算頻率時因為取樣頻率不足所導致的問題,二為利用適應性控制提升無人機速度迴路的響應。三為利用新的SiC寬能隙半導體製作PAM的前級驅動以提升效率並且縮小整體的重量以及體積。
Abstract
This article discusses development of drone control strategies and proposes new drive methods, these methods mainly consist of three parts: 1. to solve problems caused by low sampling rate when the operating frequency of BLDC is near to that of the micro-processor; 2. to use adaptive control to enhance the response of the drone’s control loop; and 3. to use wide band gap semiconductor, namely SiC, to increase total efficiency and reduce total size and weight.
前言
多旋翼無人機近年來隨著馬達控制與微控制器的進步越來越蓬勃發展,包含小型無人機相關的空拍產業、大型無人機相關的國防產業都有許多的企業與國家針開發無人機的相關應用。然而在中型的商業應用如農業上來施肥、噴藥或是搬運作物,以及執行部分不需要大型直升機,但傳統方法難以完成的任務,如清洗電塔礙子等等。
這類型的應用的馬達規格一般落在2 kw至20 kw,針對這種運輸載具的應用,效率顯得更為重要。因此,如何有效的提升整體的馬達驅動效率同時盡可能的降低整體的重量就顯得十分重要。同時絕大部分的無人機馬達都不會裝有位置感測器,因此開發穩定的高速無感測器驅動演算法也是非常重要之課題。
目前大部分市售的無人機馬達驅動器皆是採用速度開迴路模式驅動。故當負載有變化,如風向改變,或是提起重物或放下重物時,馬達的轉速就會改變。無人機只能透過高度以及姿態控制來維持無人機的穩定。本篇論文除了提出一個穩定的速度控制器,更利用適應性控制來加強無人機的速度響應。
本篇論文主要目標為研究適合低取樣頻率之無感測器控制策略,搭配幅值調變降低電流諧波進而提升馬達整題效率,同時搭配適應性控制進一步提升速度控制器的性能。
低取樣頻率無感測器驅動
無人機馬達主流是以方波驅動,一般會使用霍爾感測器。然而霍爾感測器在高速時會有落後的問題,並且安裝也需要額外的成本與空間,因此大多的無人機驅動多半採用無感測器控制。目前主要的無感測驅動接是採用相電壓量測來偵測反電動勢過零點,來判斷驅動器的換相時機[1],如圖1[2]。在偵測到反電動勢過零點(ZCP)後透過控制器延遲30度後換相。
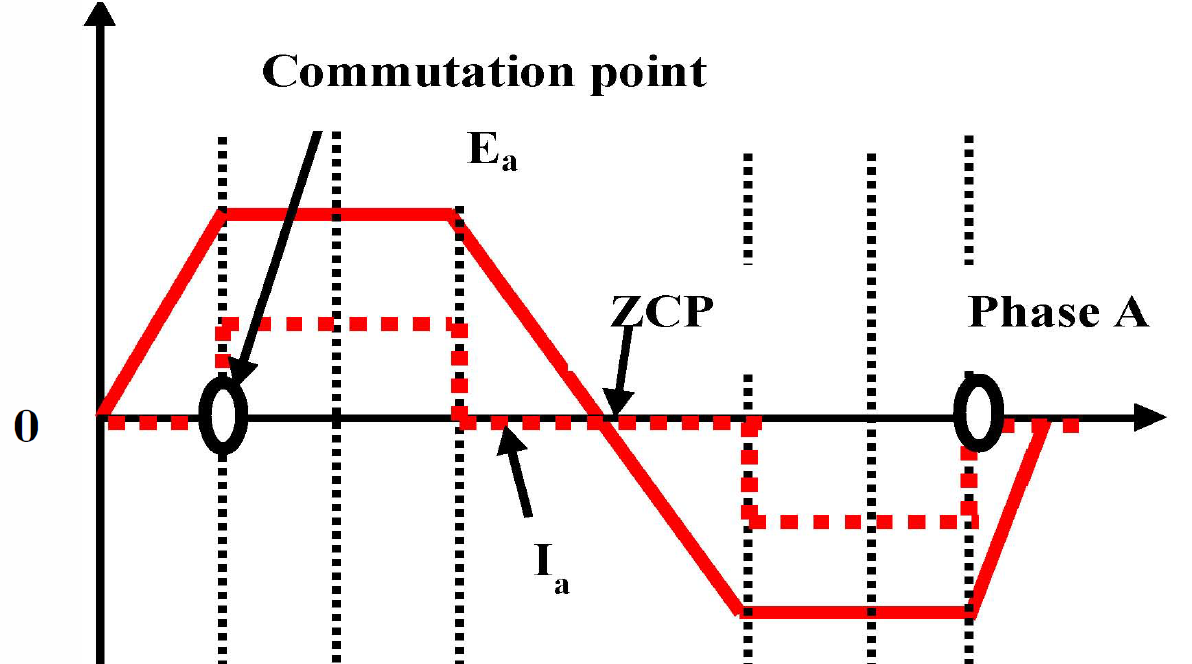
圖1 反電動勢過零點之無感測器驅動方法
過去的論文無感測器控制的速度上限大多是落在一個電器頻率週期需要15個採樣點,如果要增加速度就必須要增加控制器的運算頻率,這也會導致整體的成本增加。當取樣點不足時,真正的換相時機就會與計算出來的有誤差,影響整體的驅動效率進而導致整體系統失控。圖2展示當取樣點數不足(一個電氣周期取14的偵測點)時傳統量測方法所判斷的換相時機與真實的換相時機兩者的誤差時間。
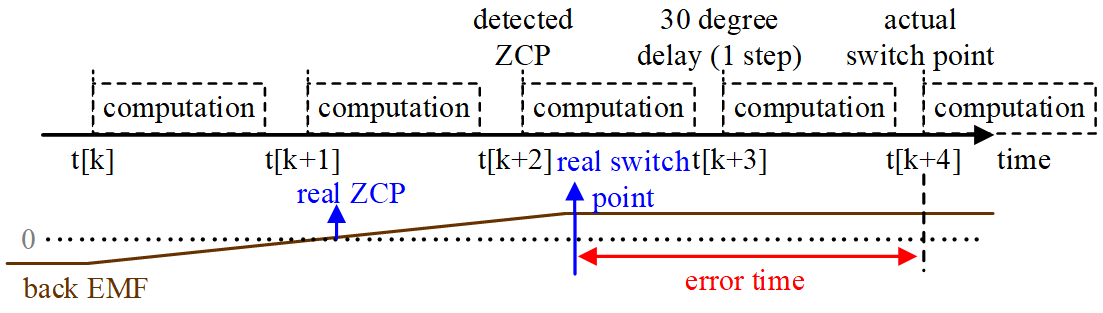
圖2 反電動勢過零點換相於取樣點不足時的錯誤情形
1.低取樣頻率無感測器驅動架構
本論文提出的低取樣頻率無感測器驅動架構如圖3所示。
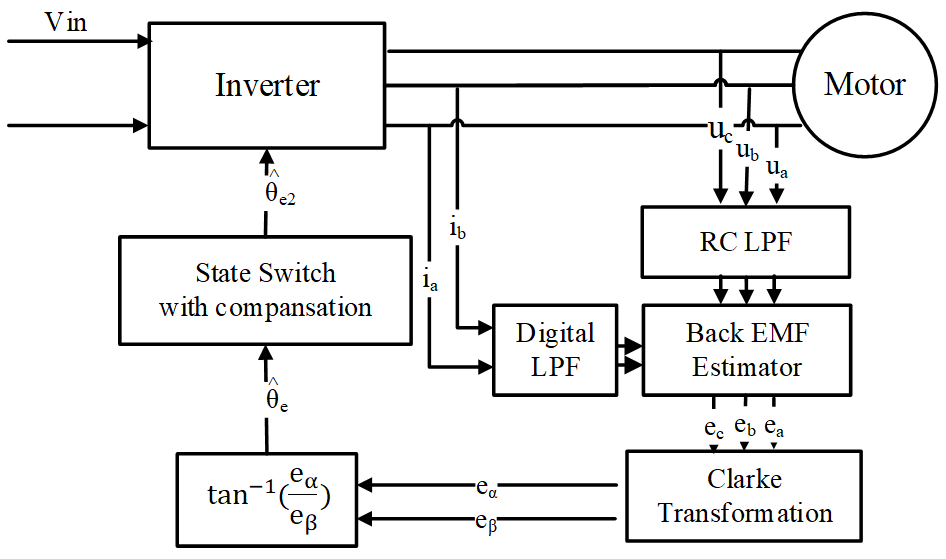
圖3 提出之反電動勢無感測器驅動方式
控制器量測三相電壓以及兩相電流,為了濾掉相電壓的PWM切換頻率,我們會加上一個一階RC濾波器。為了讓電壓與電流達到相同的相位,電流也會通過一個與數位的一階低通濾波器,頻寬與硬體的RC濾波器相同。反電動勢的計算如式(1)。
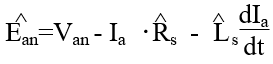 (1)
(1)
回文章內容列表更完整的內容歡迎訂購 2020年07月號 (單篇費用:參考材化所定價)