- 回首頁
- 機械工業雜誌
自駕車虛實整合安全驗證
作者 胡振煇、許修瑋
刊登日期:2021/04/01
摘要
工研院機械所提出虛實整合框架量化驗證自駕車安全性,並提高虛擬交通情境測試的精確性。我們採用Responsibility-Sensitive Safety (RSS) 模型在情境測試的每個取樣時間量化驗證自駕車狀態和控制命令的安全性。高精地圖建置的虛擬場域、混合實境車輛在迴路測試以及具有真實交通數據的模擬交通流分別降低環境、自駕車和其他用路車輛在虛擬和真實測試的差異。虛實整合框架結合具有工程可行性的技術,提供一個實用的方法進一步提昇自駕車安全驗證。
Abstract
ITRI MMSL presents a cyber-physical framework to quantitatively verify the safety of autonomous vehicles and improve the fidelity of scenario-based testing. We apply Responsibility-Sensitive Safety (RSS) model to check the safety of the control commands and states of the autonomous vehicles at each sampling time. In addition, the virtual environment based on the HD-map, mixed-reality vehicle-in-the-loop testing, and simulated traffic flow with real data are also used to reduce the differences of environment, ego-vehicle, and traffic participants between the virtual and real-world testing. The cyber-physical framework integrates feasible technologies to provide a practical approach for further advancement in the safety verification of autonomous vehicles.
前言
「我設計的演算法安全嗎?」這個問題相信是每位自駕車軟體工程師最關心的一件事。如果有一個虛擬測試環境可以快速設定各種交通情境驗證自駕車安全性,不受場地和天候的限制,不必擔心自駕車程式臭蟲或是測試車輛操作失誤造成危險,更重要的是虛擬測試和實車道路測試的數據在相同的情境設定下完全相同,這不就是自駕車工程師夢寐以求的工具嗎?在實車測試前,自駕車工程師可以全心全力開發各種駕駛策略,利用各種虛擬交通情境大量測試自駕系統的安全性,包含可能發生碰撞的危急交通情境,依據虛擬測試數據改善的性能提昇可反應在後續的實車測試。自駕車乘客和消費者能以更經濟實惠的價格享受安全性更高的自駕車所帶來的各種便利。這是我們提出自駕車虛實整合安全驗證想要達到的目標。
虛實整合安全驗證的優勢
如何引入適用於自駕車的安全驗證模型並且保持虛擬測試和實車測試的一致性是虛擬交通情境測試的二大重點。目前的標準化測試協議,如ISO Standards和EuroNCAP等,只能針對ADAS提供系統化測試,並不適用於SAE Level 3以上的自駕系統。汽車工業廣為應用的設計開發和驗證框架V模型假設駕駛者在危急時刻可以接管車輛控制,僅提供實務上可接受的驗證流程,無法完全驗證自駕車的安全性。
Mobileye提出的RSS模型[2][3]可以量化描述自駕車的狀態和控制命令在各種交通情境中是否足夠安全,目前IEEE 2846 Standard [7]也以RSS模型為基礎,進一步制定自駕車決策控制的安全標準。RSS模型藉由明確定義自駕車縱向和側向的安全距離量化自駕車的危險程度,同時提出適當反應時間內應有的加速度極值作為適當反應(Proper Response),讓自駕車回覆安全狀態,避免和其它用路車輛碰撞。我們的安全驗證系統將在測試中的每一個取樣時間驗證自駕系統的決策控制命令和狀態是否符合安全規範,藉以檢視自駕車實際上路遇到類似交通情境的反應是否可以保障乘客和其它用路人的安全。
虛擬與真實測試是否具有一致性(Consistency)以及虛擬測試是否能夠有效提昇自駕車在開放場域運行的安全性是虛實整合安全驗證的二大目標。我們提出的虛實整合安全驗證框架分別在環境(Environmental Parameters)、自駕車(Ego-Vehicle Parameters)和其他用路車輛(Other Vehicle Parameters)三方面降低虛擬和真實測試的差異。我們以自駕車使用的高精地圖建置虛擬場域,降低環境差異,自駕系統在虛擬及真實場域中的相同位置可以得到相同的道路資訊,例如停止線和行人穿越道等。混合實境車輛在迴路測試(Mixed-Reality Vehicle-in-the-Loop Testing)以虛擬交通情境測試真實自駕車,排除自駕車動態模型不夠精確的影響。為了改善其他用路車輛在虛擬和真實測試差異,我們以實地調查的交通流參數設定微觀交通流模型,產生貼近開放場域的虛擬交通流。
工研院機械所採用的虛實整合安全驗證結合虛擬和實車測試的優點,以非常低的成本大幅提昇虛擬交通情境測試的擬真性,如圖 1所示。以工研院機械所為例,虛實整合框架增加的成本主要是商用微觀交通流軟體(PTV-VISSIM[4])授權和交通流特性調查,其中微觀交通流模型可依需求採用開源專案,如SUMO[5],各級政府的資料開放平台也有愈來愈多定期更新的交通流量調查資料。同時加入高擬真模擬交通流與混合實境車輛在迴路測試,即可在封閉場域內測試驗證自駕車在開放場域面對各種交通情境的安全性,為自駕車的安全提供多一層的保障。
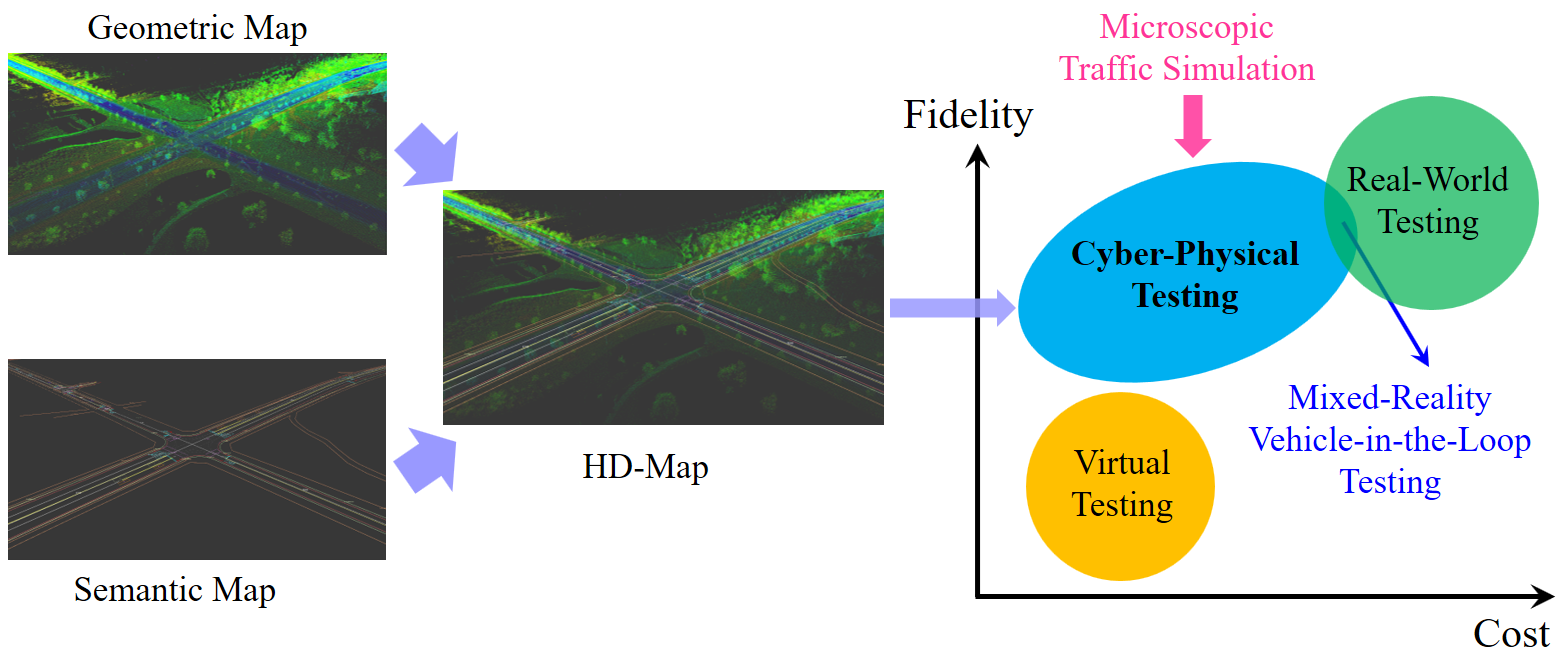
圖 1 虛實整合框架以高精地圖建置虛擬場域,在混合實境車輛在迴路測試中加入高擬真交通流,即可用極為有限的成本提昇自駕車情境測試的精確性,驗證開放場域運行的安全性
虛實整合安全驗證必須以自駕車使用的高精地圖建置虛擬場域,才能真正有效驗證自駕系統的安全性。自駕車使用的高精地圖包含幾何地圖(Geometric Map)和語意地圖(Semantic Map),如圖 1所示,幾何地圖是真實場域事先以光達掃描的三維點雲資料,語意地圖包含所有從幾何地圖擷取的道路資訊,包含車道線和道路路網等高階道路資訊,精度和幾何地圖相同。道路幾何、交通標誌及號誌決定可能發生的交通情境,例如有號誌和無號誌的十字路口可能發生的交通情境完全不同,自駕系統也會依據不同的道路資訊產生相對應的決策控制命令。若虛擬場域和真實場域不同,虛擬測試無法針對自駕車未來可能遇到的交通情境驗證安全性。
回文章內容列表更完整的內容歡迎訂購 2021年04月號 (單篇費用:參考材化所定價)