- 回首頁
- 機械工業雜誌
摘要
感應馬達只要連接市電即可運轉,常見於風水力應用場景與流體機械領域,近年來因為高效率需求增加,在感應馬達設計方面,需要考量相當多的因素。本文提出感應馬達設計流程,從馬達規格推算出符合規格的特性曲線,接著從感應馬達特性曲線得到感應馬達設計,符合高效率目標。採用計算智慧方法,調整感應馬達等效電路參數,等效電路參數計算出相對應特性曲線,從感應馬達設計得到等效電路參數,使用計算智慧方法進行感應馬達設計調整,符合規格之等效電路參數,完成感應馬達設計,並運用有限元素軟體分析進行驗證。
Abstract
Induction motors can work by connecting to utility. They are commonly used in wind and hydraulic applications and fluid machinery. In recent years, due to the increasing demand for high efficiency and high power factors for induction motors, we need to improve the design procedure of induction machines. This paper proposes induction motor design process by combining induction machine equivalent circuit model with computational intelligence. The specification can help to estimate the parameters of the induction machine equivalent circuit model to meet the requirement. We use computational intelligence method to search for the proper parameters in the equivalent circuit to meet the specification. We can obtain the design information of the induction motor from the parameters of induction machine equivalent circuit model by applying the computational intelligence method. We verify the design solution of induction machine by the finite element software.
前言
現今感應馬達廣泛應用於各種工商業場合,乃至一般居家生活。連接市電即可運轉之感應馬達又稱為定頻感應馬達,因為市電頻率為固定的原因,定頻感應馬達轉速約為固定,與馬達極數有相對應關係,舉例來說,若市電頻率為60 Hz,若馬達為兩極,轉速約為3600rpm,也就是每分鐘3600轉,此轉速稱為同步轉速,若馬達有負載,轉速會略低於3600rpm,若是四極,則其同步轉速為1800 rpm,可依此類推。
Faraday發現電磁感應定理於1831,Maxwell完善Maxwell’s equations於1860,感應馬達雛型提出者,目前認為有兩位,Galileo Ferraris於1885,Nikola Tesla於1886,其提出之感應馬達如圖1所示,當時提出之架構皆為兩相交流模型,在1889年時Dolivo-Dobrovolsky提出三相繞線式轉子感應馬達,在1990年開始被廣泛應用於工業,詳情請見參考文獻[1]。
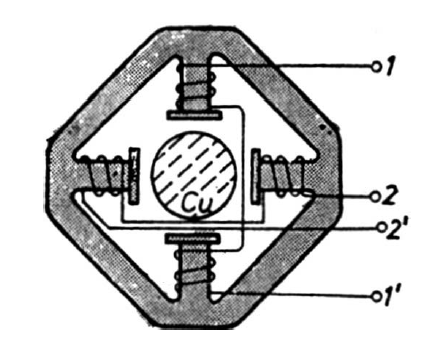
Galileo Ferraris(1885) Nikola Tesla(1886)
圖1 最早感應馬達雛型架構[1]
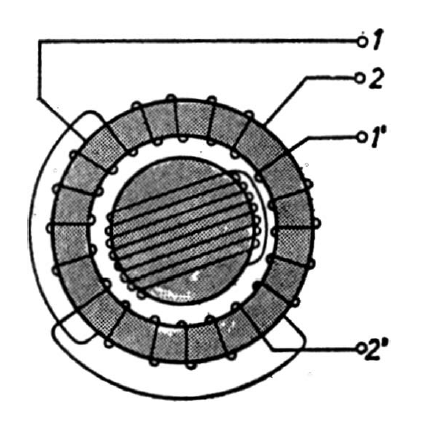
現今其架構如圖2所示,其中包含定子,定子繞線,鼠籠式轉子,風扇,端蓋,軸承,機殼等相關組件。
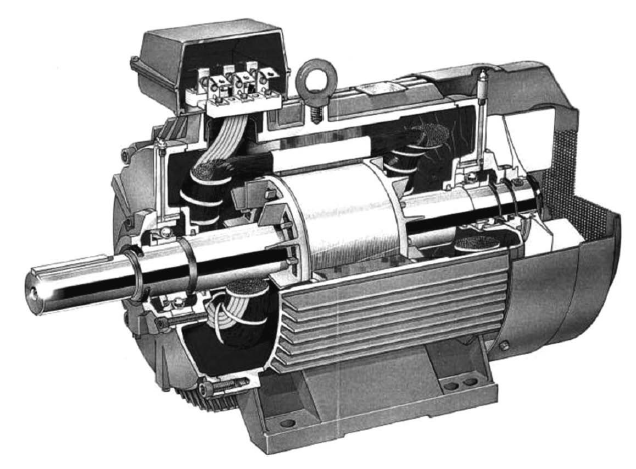
圖2 現今ABB高能效感應馬達剖面圖[1]
現今的感應馬達,依照其供電方式,可分為單相感應與三相感應馬達。單相感應馬達其定子線圈繞組多採用兩組,可分為主激磁線圈與輔助線圈,配合適當挑選之電容,可產生旋轉磁場,使其可自啟動(self-starting),不需要驅動器,其功率約為3 kW範圍,若是需要更高功率輸出,會採用三相感應馬達。感應馬達因其使用方式較為簡便,其市場上使用數量是相當高,其所需要的耗電量是相當龐大,在現今節能的需求下,對於感應馬達之效率是非常重視,其國際效率規範分別為Standard efficiency (IE1),high efficiency (IE2),premium efficiency (IE3 and NEMA premium),與super-premium efficiency (IE4),較為詳細規格,請見參考文獻[1]。如何快速設計高效率定頻感應馬達已經是目前較為重要的議題,而感應馬達的特性與其等效電路參數息息相關,傳統設計思路是先將馬達設計完成後,看其輸出是否符合規格,如果不符合即進行調整,因為感應馬達特性的獲得多採用有限元素軟體計算,其調整方式所花得時間較長,因此,若可以從規格推算出感應馬達參數,再從參數計算出馬達尺寸資料與繞線資料,再透過有限元素軟體確認設計,則可加速設計流程,因此本文從規格到相等效電路參數的確定,再從等效電路參數到三相定頻感應馬達設計作為文章思路,進行論述,另外要調整參數過程較為冗長,採用計算智慧方法(Computational Intelligence)進行調整。首先,下一節會先敘述相等效電路參數與特性曲線之間的關聯性。
感應馬達相等效電路與特性曲線計算
定頻感應馬達相等效電路如圖3所示,其建立過程可見於參考文獻[2],圖3中的V1為相電壓,X1為定子繞組漏感電抗,I1為定子相電流,RC為鐵損電阻,Xm為激磁電抗,I2'為轉子導體電流映射到定子側電流,X2'為轉子漏感電抗映射到定子,R2'為轉子電阻映射到定子,s為滑差,1為轉子靜止,0為同步轉速,a為定轉子匝數比,IC為鐵損等效電流,Im為定子激磁電流,R1為定子相電阻。
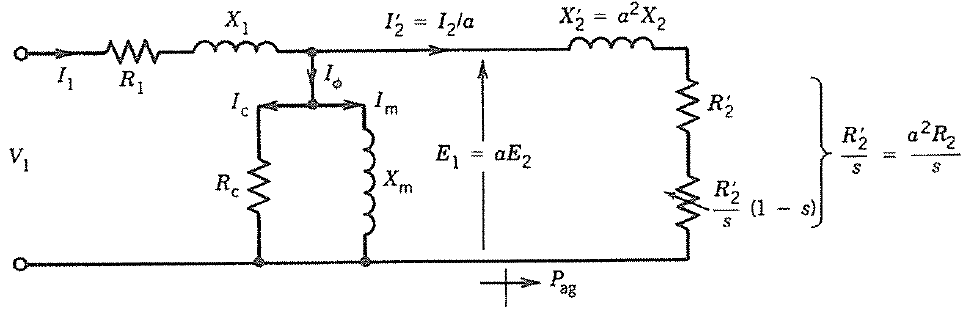
圖3 定頻感應馬達相等效電路及其參數[2]
回文章內容列表更完整的內容歡迎訂購 2021年07月號 (單篇費用:參考材化所定價)
主推方案
無限下載/年 5000元
NT$5,000元
訂閱送出