- 回首頁
- 機械工業雜誌
極精密雷射振鏡馬達運動控制系統設計
作者 林奕任、楊士進、周柏寰
刊登日期:2021/07/01
摘要
本文針對雷射振鏡馬達驅動系統提出極精密速度與加速度雙估測回授運動控制設計,旨在提升印刷電路板製造精度與擾動抑制性能。該設計以永磁電機搭配高解析脈衝插值正餘弦編碼器為基礎,提出一種僅透過位置回授的速度與加速度雙估測器。第一個速度估測器設計可提升系統穩定性並消除差分雜訊。此外,因加速度與負載力矩成正比,藉由第二個加速度估測器設計進行加速度回授控制,可改善反射鏡片在高速偏擺下不平衡的力矩擾動問題。最後,本文將整合雙估測器與運動控制器於振鏡馬達驅動系統中進行性能實測,期望能改善雷射加工精度。
Abstract
To improve the printed circuit board (PCB) manufacturing accuracy and the disturbance rejection performance, this paper proposes a high-precision motion control for the Galvano motor system through the dual observer for speed and acceleration estimation. The Galvano motor is implemented by a permanent magnet (PM) motor with a sine/cosine encoder for the feedback control. The position sensing resolution is increased based on the interpolation of every two encoder counts. After that, a dual-observer is proposed respectively for the speed and acceleration estimation using only the position measurement signal. The first speed observer is designed to remove the differentiate noises and improve the system stability. In addition, since the acceleration is proportional to the motor load torque, the second acceleration observer is developed for the acceleration feedback control to improve the disturbance load torque, caused by the unbalanced rotation of the laser mirror. The proposed dual-observer estimation and motion control are implemented in a Galvano motor system for the experimental validation.
前言
在現代印刷電路板的製造上,雷射加工扮演著至關重要的角色。相較於傳統機械加工,雷射加工不論在電路板雕刻、切割及鑽孔都要來得快速且精確[1]。因此對於製造商而言,多數選用雷射振鏡掃描系統作為加工製程的一環。如圖1所示,雷射振鏡掃描系統主要由兩組高速振鏡馬達搭載反射鏡片來控制雷射光前進方向,並透過一套場鏡(F-Theta Lens)使得雷射光能夠均勻聚焦於加工平面上。其中,為滿足高速精密雷射加工需求,在振鏡馬達的選用上多以永磁電機與音圈馬達兩者為主。
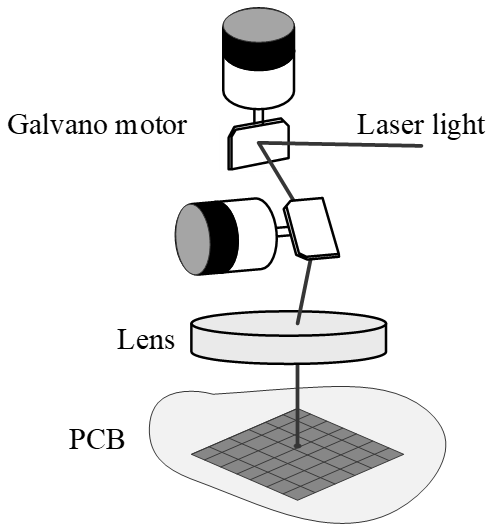
圖1 雷射振鏡掃描系統
然而音圈馬達輸出轉矩有限,在大型系統設計上則以永磁電機為主[2]。此外,考量微米等級加工需求,永磁電機上需安裝正餘弦位置編碼器來實現極精密雷射定位控制。首先,該編碼器輸出訊號為兩相類比弦波,訊號需先透過增益補償及準位校正的方式改善量測訊號品質[3],並透過數位鎖相迴路進行解碼以取得位置資訊[4, 5]。但總體而言,位置感測解析度仍然被編碼器本身所限制。因此,在[6]中提出脈衝訊號插值演算法,透過類比數位轉換器與正交脈衝訊號解碼器的搭配,能夠有效地提升位置感測解析度,不過在高速下類比訊號轉換延遲的問題可能會導致量測訊號失真[7]。而此種演算法已被實現於德州儀器TIDA-00176中[8]。
由於高速雷射加工的需求,在振鏡馬達運動控制器設計上,電流控制多以高頻寬類比電路來實現[9],並透過數位控制迴路與前饋控制器的設計來提高系統響應[10]。然而設計前饋控制器需要速度資訊,但以往速度資訊由位置差分而得,易含有差分雜訊。因此,可藉由速度估測器的設計避免差分雜訊產生[11],但估測精度與系統參數息息相關[12]。另外在高速定位控制下,不平衡的鏡片擾動將引發馬達振動,進而影響控制精度[13],不過此振動可應用振動諧波估測與解偶法進行改善[14, 15]。但該方法需建立鏡片振動模型,對系統參數仰賴性高。然而因為振動力矩與加速度成正比,在控制器設計上也可藉由加速度回授的方式進行振動抑制補償[16]。但是振鏡馬達一般位於高溫密閉的環境,加速度計安裝不易。因此,以位置回授進行無感測器加速度估測的設計更為重要。
在振鏡馬達控制系統設計上,本文提出速度與加速度雙估測回授控制設計,該設計僅透過正餘弦位置編碼器即可實現極精密運動控制。且由於該編碼器位置資訊是透過兩相正交脈衝訊號內插而得,總解析度由類比數位轉換器與正餘弦編碼器解析度的組合決定。基於此高解析度的位置回授訊號,提出用於速度與加速度估測的雙估測器設計。首先,將位置訊號作為閉迴路速度估測器輸入,該估測器含有低通濾波特性可消除以往速度估測因位置差分所產生的雜訊,並透過力矩前饋的方式針對低通濾波相位落後的問題進行補償。再者,提出獨立的閉迴路加速度估測器來取代加速度計的安裝,並藉由加速度回授控制進行力矩擾動估測補償,在提高動態系統剛性的同時,還可以提升系統運動控制頻寬,進一步地改善雷射鏡片在高速偏擺下不平衡的力矩擾動問題。最後本文將使用雙估測器與運動控制器於振鏡掃描系統中進行性能實測,期望提升雷射振鏡掃描系統加工效率與精度。
振鏡馬達系統
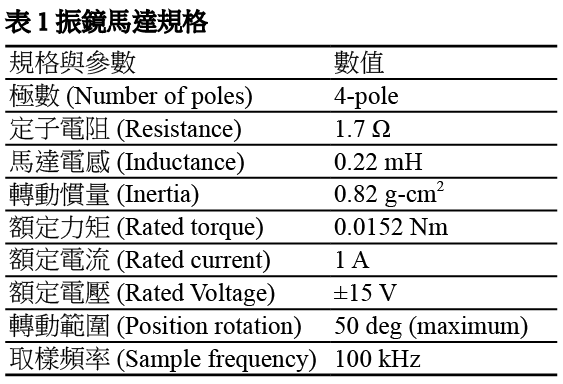
本章節將介紹本文振鏡馬達拓樸結構如圖2所示,本文振鏡馬達為內磁式結構,該結構內部由四極磁鐵黏貼於轉子表面,並透過相應的定子繞線設計提供電磁能量轉換,另在轉子末端含有一組高解析位置感測器用以滿足精密雷射鏡片定位控制需求。表1為詳細馬達規格參數。
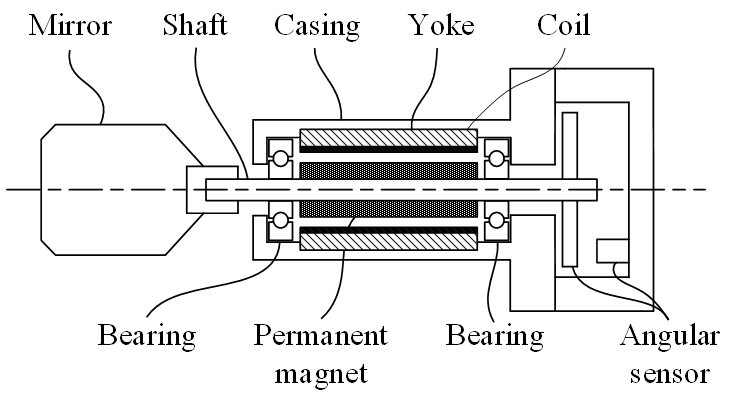
圖2 內磁式雷射振鏡馬達結構示意圖
回文章內容列表更完整的內容歡迎訂購 2021年07月號 (單篇費用:參考材化所定價)
主推方案
無限下載/年 5000元
NT$5,000元
訂閱送出