- 回首頁
- 機械工業雜誌
應用於顯示器自動化檢測之機械手臂虛擬工具中心點自動校正與位置教導系統
作者 黃成凱、麥朝創
刊登日期:2021/11/01
摘要
機械手臂的精度受到工具與工件位置的正確性影響,必須對其校正才可確保精度。目前工具中心校正方法大多依賴實體特徵點之辨識,對於無實體工具中心點之應用而言(如非接觸檢測、噴塗)則難以校正。為解決此問題,本文提出虛擬工具中心點自動校正與位置教導系統並導入顯示器檢測應用:利用三角測距搭配視覺伺服完成校正與位置教導,解決目前非接觸應用之虛擬工具中心點依賴人力進行位置教導之問題;透過自動教導方法,無須依賴操作者之經驗,有效克服技術人力養成不易及製造業缺工之問題,符合產業對於智慧製造之期待與需求。
Abstract
The precision of the robotic arm is affected by the accuracy of the positions of tools and workpieces. To ensure the precision of robotic arm, it must be calibrated with the positions of tools and workpieces. Currently, the calibration methods for tools typically rely on recognition of physical characteristic points. Consequently, these methods cannot be applied to situations when no physical tool center point is presented such as noncontact detection or spray coating. To solve this problem, an automatic calibration and robot position teaching system for virtual tool center points was proposed and applied for display detection. The system uses triangulation ranging with visual servo to complete calibration and position teaching and solve the problems that caused by noncontact applications of virtual tool center points, and eliminate reliance on manpower for robot position teaching. Once the automatic teaching method is applied, the operator experience is unnecessary. Training or recruitment of skilled manufacturing workers is no longer necessary and meet the industry’s expectations and needs for smart manufacturing.
前言
近年來,各國政府持續推動智慧機械產業升級,在資金、法規等多方支持與協助下,製造業已逐步走向智慧化與自動化。但對於許多國內產業必要之關鍵技術,卻仍以國際大廠產品為主,使得智動化應用的利潤與差異化受制於人,因此發展國產智慧自動化技術,將有助於在產業價值鏈中取得優勢地位,並提高技術的自主能力。舉例而言,台灣顯示器產業自1987年政府開始投入研發,生產設備產值於2020年已超過新台幣710億元,帶動就業人口達數十萬人;但在顯示器檢測系統方面,卻仍以國際大廠的產品為主,其產品礙於檢測精度之要求,大多以擺頭式五軸之機構為主。雖然此機構配置可達到良好的定位精度,但運動範圍小,不易用於大尺寸之顯示器檢測。
機械手臂具備工作範圍大與成本低之優勢,若以機械手臂建構顯示器檢測系統,可使檢測系統應用於更大尺寸範圍之顯示器檢測,但目前卻礙於機械手臂絕對精度不佳之問題,而不易導入高精度檢測應用。在機械手臂絕對精度方面,隨著自動化應用的發展與精度需求的日益提升,目前已有許多學者提出工具中心點的自動校正方法,唯其方法大多仰賴實體刀具中心點的辨識才能執行;對於非接觸檢測應用之虛擬刀具中心點校正而言,則需透過治具輔助校正且流程繁瑣,耗時費力難以大量導入;然而即使工具中心點經過校正後,大多仍無法滿足精度需求,因此尚需透過人工調整之方式修正動作以提高精度。針對以上問題,本文提出虛擬工具中心自動校正與位置教導方法,透過機械手臂重複精度極佳之特性,搭配位置自動教導技術建構顯示器檢測系統,以機械手臂所建構之系統相較於擺頭型五軸機構,具有工作範圍大與成本低之優勢,使檢測系統可應用於大尺寸範圍之顯示器檢測,且可以省下人工操作的時間、避免人為操作產生誤差,進一步提升機械手臂之精度並縮短製程導入時間。本檢測系統之開發,可解決目前顯示器檢測系統設備昂貴且佔空間、量測尺寸範圍小等痛點,並同時解決機械手臂教導調試不易、精度不佳等問題,同時突破多項技術與限制,有助於促進產業升級。
在相關研究方面,目前不論手動或自動的校正方法,大多仰賴實體刀具中心點之辨識,亦即工具上必須具有實體的尖點才可進行校正:傳統的工具中心校正方法需透過人工教導的方式使工具中心以數個不同姿態到達空間中相同位置,而後再透過運動學方程式計算工具中心座標以完成工具中心校正,但透過人工操作的方法進行校正十分費時且誤差較大;自動校正方法除了需要實體特徵點辨識外,亦存在以下缺點:(1)透過重複的校正流程,逐步修正工具中心座標使其往正確位置逼近[1][2];(2)於機械手安裝額外的感測器,利用感測器與工具中心點的相對關係估算座標值[3];(3)於空間中安裝一裝置並先校正裝置與機械手的相對關係後再進行工具中心的校正[4][5]。對於無實體刀具中心點之應用,僅極少部分之方法可進行校正且位置教導流程十分不易[6]:現有方法需以感測器取代工具,並透過三次元量測設備量測指定特徵點之空間位置,再透過幾何估算方式取得感測點與虛擬刀具中心點之關係完成校正。本文提出之虛擬工具中心點自動校正與位置教導之方法,以三角測距搭配視覺伺服控制機械手臂,使虛擬工具中心以數個不同方位移動到空間中相同位置完成虛擬工具中心校正,而後再以三角測距計算工具與工件之夾角及虛擬工具中心位置進行自動教導,解決目前虛擬工具中心點無法直接校正及動作教導所需花費的人力與時間。
機械手臂虛擬工具中心點與動作教導法
機械手臂具有許多優越之特性,但卻受限於絕對精度不佳,使得動作規劃通常需要以人工教導之方式執行;此方法是由操作者引導機械手臂至欲到達的各個位置,並記錄其座標。由於機械手臂具有良好的重現性,因此可以很準確地執行教導過的動作。但隨著自動化應用日趨複雜與精度需求的日益提升,若工具中心之位置誤差過大,則控制機械手臂進行定點繞軸動作時,將產生明顯偏移,而使教導困難而耗時,因此工具中心點之準確度皆直接影響自動化應用導入效率及成果。
在機械手臂末端安裝工具後通常需要知道工具中心的座標,但由於人工裝配與加工皆會產生誤差,因此需要經過校正後才可得到準確的座標值。本文提出虛擬工具中心點之自動校正與位置教導方法,其系統包含機械手臂110、攝像器120、光源130及控制器140、安裝於機械手臂之工具10(工具軸向A1)、測試平面20,其中控制器用以控制機械手臂驅動工具之工具軸向投影於測試平面之投射點P1相對測試平面之參考點O1進行相對運動,如圖1所示,其校正流程共分為四個部分:(1)建立機械手臂與測試平面之關係:若視覺感測器對正於測試平面時,可透過沿機械手臂座標系三軸向移動之影像資訊求解聯立方程式以求得轉換關係;若影
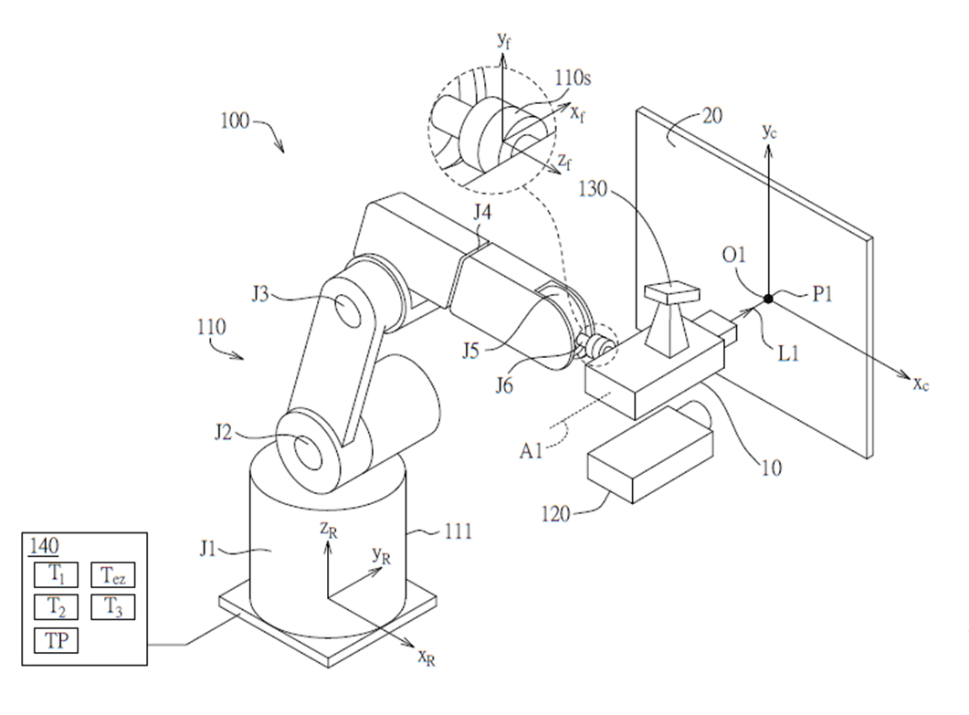
圖1 虛擬工具中心點自動校正系統
回文章內容列表更完整的內容歡迎訂購 2021年11月號 (單篇費用:參考材化所定價)