- 回首頁
- 機械工業雜誌
摘要:雙臂機器人系統模仿人類雙手來進行複雜的工作,相較於單臂機器人,可處理更加複雜的任務。本文介紹了工研院機械所機器人實驗室(ITRI Robotics Lab)所開發的雙手臂機器人系統(Dual Arm Robot System, DARS)。首先介紹DARS所使用的機械手臂,接著我們介紹如何使雙手臂同時協同運動,最後介紹DARS中所搭載智慧視覺系統。
Abstract:Dual arm robot system imitates human hands to perform complex tasks and handle more complex tasks than single-arm robot. This article introduces the Dual Arm Robot System (DARS) developed by ITRI Robotics Lab. First, we will introduce the robotic arms used in DARS, and then discuss how to solve the dual-arm synchronization problem, and finally, describe the intelligent vision system that being installed in DARS.
關鍵詞:雙臂機器人系統、冗餘手臂、視覺
Keywords:Dual arm robot system, Redundant arm, Vision
前言
國際機器人聯合會(International Federation of Robotics, IFR)統計[1],工業機器人的數量在2015年到2020年平均每年有13%的成長,如圖1所示。目前已有約400萬工業機器人在全球的工廠內工作。全球五大工業機器人的市場分別是中國、日本、美國、南韓以及德國,這五國工業機器人的銷量佔全世界76%。即使在全球受到COVID-19疫情影響下,2020年工業機器人的銷量仍有微幅的成長,在疫情逐漸趨緩,IFR預估工業機器人的銷量將會有更強勁的成長。
隨著工業4.0的蓬勃發展,實現智慧製造、智慧工廠,已經是現代製造產業的主流發展趨勢。智慧製造透過各式感測器來收集數據,並使用機械手臂、無人搬運車和各種製造設備,搭配人工智慧使得生產流程達到高度自動化,甚至在製造過程中可以不斷自我學習,進而持續優化製程。
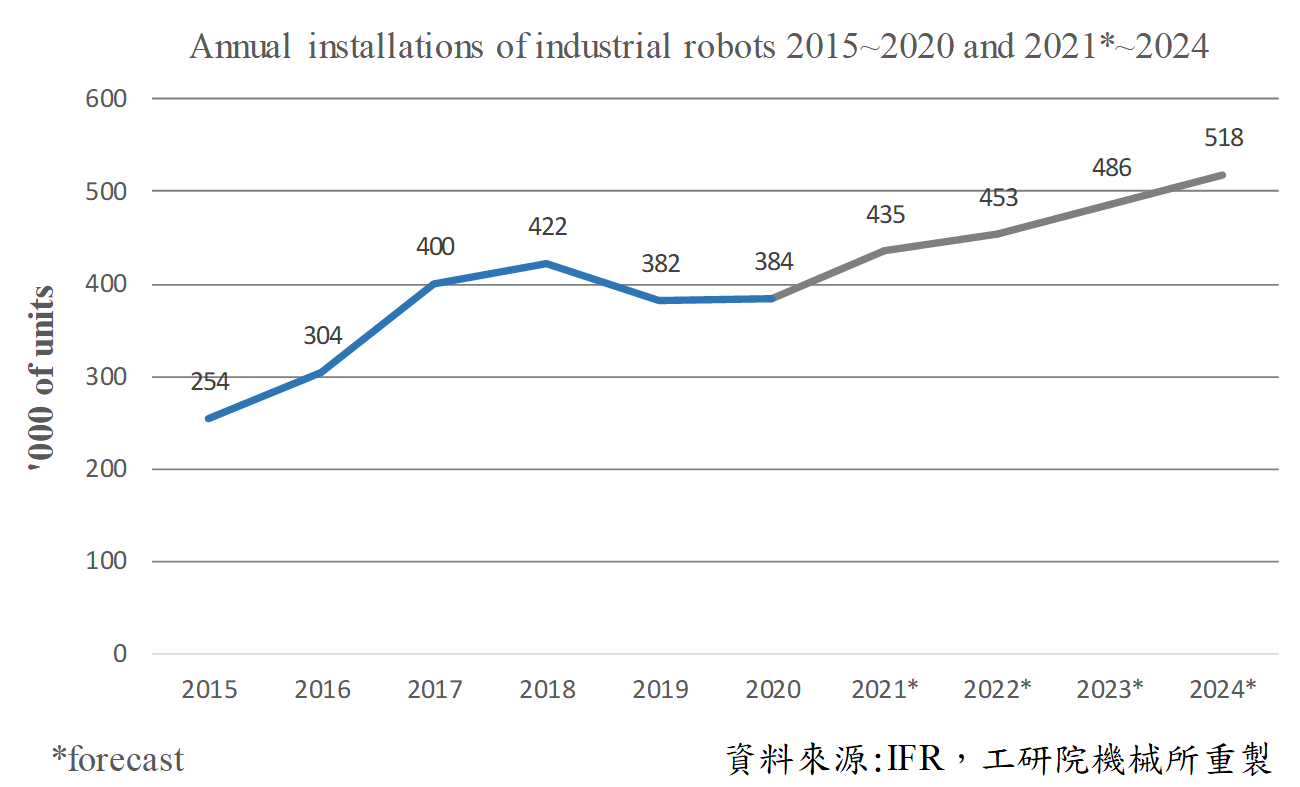
圖1 IFR預估工業機器人銷量
此外隨著消費市場快速變化,生產模式開始從大量製造的模式,漸漸走向生產小量且多樣的客製化產品。如何使生產線內的機器人系統快速、彈性的面對不同的生產需求,對於製造業來說變得至關重要。
機械手臂部分
一般市售機械手臂的關節數量在六個以下,如圖2所示,當使用者指定末端執行器的姿態時,前三軸貢獻末端執行器的位置(position)設定,後三軸貢獻末端執行器的方位(orientation)設定。因為其逆向運動學(inverse kinematics)計算能夠以解析解的形式呈現[2],此類手臂能夠快速且簡潔地完成使用者指定的軌跡。其適合部署在一些環境空曠、無過多障礙物的場合,用最低的運算量高速完成使用者的簡單任務。

圖2 六軸機械手臂
當機械手臂的關節數量超過六軸,甚至達到十軸以上,此類機械手臂被歸類為冗餘機械手臂(redundant robot manipulator)。相較於關節數量在六軸以下的非冗餘機械手臂,冗餘機械手臂更可在複雜的環境下展現其機械手臂的靈活度[3-4]。而現在於DARS雙臂機器人系統上搭載便是工研院機械所自主研發生產的SJ系列機械手臂SJ705,其擁有七個關節,歸類在冗餘機械手臂的範疇。DARS的機構組態,如圖3所示,機械手臂SJ705的機構組態,如圖4所示。
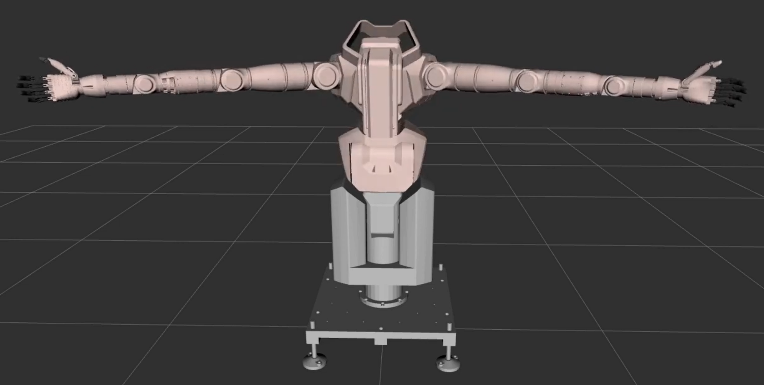
圖3 DARS機構組態
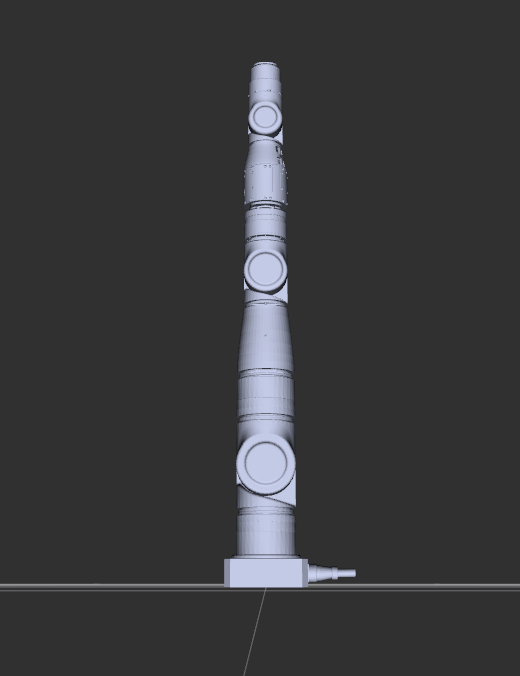
圖4 SJ705機構組態
我們所處的世界屬於三維空間,但如果以數學方法定義一個物體在空間中的姿態(pose),我們最少需要六個變數[5],其中三個變數分配給物體位置(position)的描述,常見的描述位置方法如笛卡爾座標系統(Cartesian coordinate system),最後三個變數分配給物體轉向(orientation)的描述,常見的描述轉向方法如尤拉角表示法(Euler angle representation),或是RPY表示法,共六個變數亦可稱六維任務空間。
回文章內容列表更完整的內容歡迎訂購 2022年08月號 (單篇費用:參考材化所定價)