- 回首頁
- 機械工業雜誌
電動巴士車道維持輔助系統開發與驗證
作者 何政翰、古昆隴、徐榮弘
刊登日期:2024/04/01
摘要:車道維持輔助系統 (LKAS) 屬於先進駕駛輔助系統 (ADAS),可即時監測車輛與車道線邊界的相對
位置關係,當即將發生偏離車道時主動介入轉向系統,將車輛修正回原車道。工研院機械所針對電動巴士開發車道維持輔助系統,感測器採用單一鏡頭作為車道線辨識方案,亦使用電子陀螺儀估算車身姿態,ADAS 控制器嵌入自主研發的車道維持演算法,其中估測跨越車道線之時間與頭向角誤差為實現車道維持功能的核心技術。線控轉向方案採用國產的電動助力轉向 (EPS) 馬達與原車轉向系統整合,同時將線控轉向模型輸入整車控制器。在低速與高速兩階段之車道維持性能驗證測試中,配備工研院所開發車道維持系統的 12 米低底盤電動巴士達成車道偏離修正功能,LKAS 作動時速在 40~90 公里之間。在啟動方向燈狀態下系統並未介入轉向,除此之外,可藉由轉動方向盤強制解除轉向修正介入,確保駕駛者擁有控制車輛之最高優先權。
Abstract:Lane keeping assist system (LKAS) is an advanced driver assistance system (ADAS) which can
real-time monitor vehicle’s position with respect to the lane boundary and intervene steering system actively
for the purpose of correcting the bus back into its lane, when a lane departure is about to occur. Mechanical and
Mechatronics Systems Research Lab, ITRI developed Lane Keeping Assist System for electric buses. Single
camera sensor is used to detect lanes and digital gyroscope is used to estimate vehicle attitude. ADAS controller
was embedded with self-developed lane keeping control algorithm. Among algorithm, time to line crossing
estimation and heading error calculation are core technologies for lane keeping function realization. Domestic
electric power steering (EPS) motor integrated with original steering mechanism was adopted as steering by�wire solution while steer-by-wire model was imported into vehicle control unit.12 meters low floor electric bus
equipped with lane keeping assist system developed by ITRI accomplished lane departure correcting function
under low-speed and high-speed, two stages of lane keeping performance validation test that operating speed of
LKAS is 40~90 km/h. System was disabled on steering intervention while activating turn signal. Besides, LKAS
can be mandatory terminated by applying torque on steering wheel, which ensures drivers always own the highest priority to handle vehicle.
關鍵詞:電動巴士、車道維持、線傳控制轉向、多體動力學
Keywords:Electric bus, Lane keeping assist system, Steer by-wire, Multi-body dynamics
前言
根據國際能源署 (IEA) 的數據,全球的二氧化碳排放量中交通運輸約佔 24%,聯合國環境署(UNEP) 則指出巴士是大眾交通運輸中主要的碳排來源,因此能源轉換效率極佳的電動巴士成為各國政府積極推動的方案。在 2022 至 2030 年間全球電動巴士將以 40% 以上的年複合成長率快速成長。我國政府訂出 2025 年市區電動公車達到 35%的普及率,以及 2030 年約 12000 輛市區公車全面電動化之目標。為提高智慧電動巴士產業的競爭力,交通部「電動大客車推動計畫車輛業者資格審查作業要點」訂定自動化及智慧化設備項目及實施期程,並提供每部配備先進駕駛輔助系統之電動巴士得再增加 150 萬補助之誘因,增進業者導入先進駕駛輔助系統之意願。自 2023 年起,電動大客車自動駕駛輔助系統應符合修正轉向功能(CSF) 之規定;自 2024 年起,電動大客車自動駕駛輔助系統應符合自動控制轉向 (ACSF)B1 類車道置中輔助功能之規定。國際上 Bosch、ZF 等大型一級供應商已推出對應電動大客車的先進駕駛輔助方案導入量產電動巴士。然而國內巴士產業受限規模量體較小,亟需自主開發先進輔助駕駛方案以導入國產電動巴士。
工研院機械所智慧車輛組基於過去十年於自動駕駛、底盤線傳控制系統、載具電動化等關鍵技術,整合工研院團隊自行發展之車道維持演算法、線控轉向模型等軟體與國產整車控制器、國產線控轉向馬達等硬體,搭配符合車規可靠度之感測器、控制器方案,完成國產自主開發之車道維持輔助系統。目前已與國內巴士製造商合作,將這套系統搭載於國產電動巴士量產車型並實現
車道維持功能,提升載具安全性。
電動巴士車道維持輔助系統開發與驗證
1. 車道維持輔助系統架構
車道維持輔助系統係指當車輛逐漸偏離車道的情況下,介入修正行駛軌跡,將車輛維持於車道內的系統,屬先進駕駛輔助系統 (advanced driver assistance system, ADAS) 的一環,車道維持輔助系統由感測器、ADAS 控制器、致動器,以及嵌入原車整車控制器 (Vehicle control unit, VCU)的線控轉向模型,亦包含儀表燈號警示音等資訊。
圖 1 為工研院針對電動巴士所開發之車道維持輔助系統架構,可對應 7~12 米的巴士車型。車道維持輔助系統的關鍵元件項目,感測器採用Mobileye EYE Q4 全協議版本之單一鏡頭方案作為車道辨識模組;ADAS 控制器採用 NVIDIA Jetson AGX Xavier NRU-120S;轉向致動器採用國產新創公司寰宇宏科技 (Megago) 型號 E00703 之線控轉向馬達 (Electric power steering, EPS),工研院基於模型開發 (Model-based) 之線控模型則整合至目標巴士整車控制器,整車控制器則是由工研院新創的科飛數位 (Kopherbit) 提供,亦是目前國產化整車控制器的唯一方案。
2. 線控轉向系統功能實現與性能驗證
線控轉向 (steer by-wire, SBW) 功能為巴士欲達成車道維持輔助系統需具備的項目,工研院線控團隊在目標巴士原有轉向系統增加一組轉向馬達並與 24 V 低電壓系統整合,以實現線控轉向。圖 2 為 12 m 巴士轉向系統與前軸機構圖,依序由方向盤 (steering wheel)、轉向機柱 (column),再經轉角器 (steering gear bracket) 轉 90 度並透過轉向軸傳遞至液壓轉向器 (hydraulic steering box) 放大轉向作用力並旋轉畢特門臂 (Pitman arm) 帶動轉向拉桿 (tierod),改變輪胎轉角。相較乘用車以馬達直接提供轉向助力已是成熟方案,絕大多數大車仍以馬達搭配液壓轉向器的電動液壓助力轉向(electro-hydraulic power steering) 為主流方案,僅有 BOSCH 針對大型車輛提供 ServoE[1] 純電動助力轉向 (fully electric power steering) 方案。工研院團隊採用電動液壓助力轉向之線控方案,將 EPS 馬達安裝於轉角器和液壓轉向器之間的縱軸上,與配置於轉向機柱相比,除了不會佔據駕駛座位的膝部空間,EPS 配置靠近液壓轉向轉向器,受機構扭轉與齒輪間隙影響越小,具備較佳的響應頻寬與低延遲之優點,有利於轉向控制。選用的 E00703 型號之 EPS 馬達由新創公司寰宇宏科技開發,也是目前國內較成熟之 EPS 方案,操作電壓 24 V 與原車的低電壓系統相符,可提供最大扭矩 55 Nm 也滿足全尺寸 (12 m) 電動巴士前軸最大載重 6 噸下轉向扭矩 40~45 Nm 的需求,角度控制為 1800°(5 圈 ),防水等級為 IP67 並通過 ECE R10 Rev 5 之 EMC 測試。於轉向定位機上同步進行轉向機構定位與EPS控制零點的校正,接著測試目標巴士空檔狀態,無論 24 V 系統是否上電,方向盤左右轉動角度皆可達 900°,即滿足方向盤左右轉動圈數兩圈半以上的需求。最後執行線控轉向系統原地響應測試,確保 0.8 Hz 弦波命令輸入與目標巴士前輪機構響應的相位差應低於 20°,滿足巴士轉向操控的最低響應頻寬要求,至此已完成 EPS 與原車轉向軟硬體整合與線控轉
向響應測試。
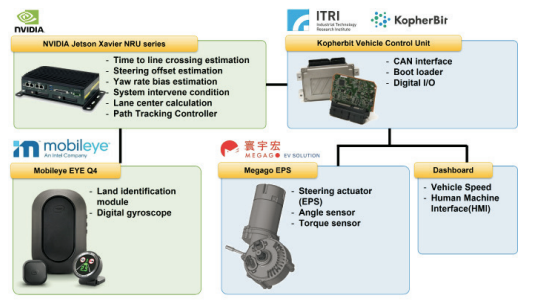
圖 1 工研院開發之車道維持輔助系統架構
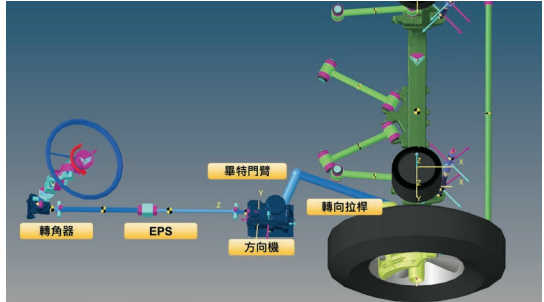
圖 2 線控轉向系統機構配置圖
回文章內容列表更完整的內容歡迎訂購 2024年04月號 (單篇費用:參考材化所定價)