- 回首頁
- 機械工業雜誌
- 歷史雜誌
摘要:隨著工業4.0的快速發展,智能工廠已成為現在工業趨勢,其中干涉儀將擔任超精密離線或線上量測的最重要角色。本研究提出一套干涉儀,它是由一雙頻雷射和六個干涉模組所組成,且它能夠同步地檢測精密平台的六個位移(兩個沿x軸,三個沿y軸,一個沿z軸),並依此計算該平台的六自由度幾何誤差。本文詳細地介紹了該干涉儀、實驗架設、與實驗結果。結果證實了所提出干涉儀的正確與可應用性。
Abstract:With the rapid development of Industry 4.0, smart factories have become the current industrial trend where interferometers would be in charge of offline or online super-precision inspections. An interferometer, composed of a dual-frequency laser and six interference modules, capable of inspecting precision stages was proposed in this research. The interference modules retrieve six displacements, two along x-axis, three along y-axis, and one along z-axis of the examined stage, which are then used to figure out the stage’s six-degree-of-freedom geometric errors. This paper introduces the interferometer in detail, it then presents the experimental results from the use of the interferometer. The results confirm the validity and applicability of the proposed interferometer.
關鍵詞:差頻干涉儀、精密位移平台、六自由度、幾何誤差
Keywords:Heterodyne interferometer, Precision stage, Six-degree-of-freedom, Geometric error
前言
精密線性位移平台已是現今工具機、數控加工中心、LCD檢測機、座標測量機等的關鍵元件;理想情況下,精密線性位移平台會沿直線行進而沒有定位誤差;然而,機台製造誤差、安裝誤差和環境之擾動使得其位移在六個自由度有一個定位誤差(εx)、兩個直線度誤差(εy,εz)和三個旋轉誤差(α,β,γ),這在很大的程度上影響了機台的性能。為了瞭解這六自由度誤差的大小,雷射校準系統乃被開發出來[1-3]; 然,它們存在著測量耗時且不能檢測α-誤差缺失,其中測量耗時是由於必需逐一地測量各個誤差所致。
為了克服上述雷射校準系統的缺點,學者們提出了許多光學儀器;其中一些是基於干涉儀和位置感測器的理論[4-8]、一些是基於干涉儀和光柵繞射的理論[9]、一些是基於干涉儀、位置感測器和自動準直儀的理論[10]。然而,它們中的一些使用特定的組件,使得它們的被複製困難;一些使用低解析力的測頭,使得它們對誤差的檢測,精細度不足。
六軸干涉儀量測原理
本研究乃提出一套創新型六軸干涉儀,它包含六個干涉模組;而這六個模組又可成兩類:縱向與橫向位移量測干涉模組。底下先說明這兩模組的量測原理,在闡述本六軸干涉儀的架構。
● 縱向位移量測干涉模組
圖1所示即縱向位移量測干涉模組的架構;它包含一雙頻光源、一干涉儀模組、及一相位解調模組。雙頻光源包含一雷射源、一非偏極分光鏡、及一光接收器,且它輸出一雙頻雷射與一參考信號Ir;其中雙頻雷射的頻率分別為v1及v2、且極化態又分別為垂直線偏極(振盪方向垂直入射面,以●表示)及水平線偏極(振盪方向平行入射面,以 表示)。干涉儀模組包含一偏極分光鏡、兩反向反射鏡、及一光接收器;其中反向反射鏡CC2被固定在受測平移台上,隨該平移台沿y軸移動。來自光源的光束在偏極分光鏡處,被分為垂直及水平線偏極光兩束,它們緊接著又分別被反向反射鏡CC1及CC2反射回偏極分光鏡,並重新合併;最後重新合併光,在光接收器產生量測信號Imy。
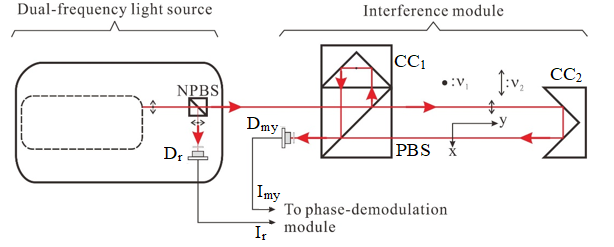
圖1縱向位移量測干涉模組
Dual-frequency light source:雙頻光源、interference module: 干涉儀模組、phase-demodulation module: 相位解調模組、NPBS:非偏極分光鏡、PBS:偏極分光鏡、CC1及CC2:反向反射鏡、Dr及Dmy:光接收器
我們由參考資料[1]及[2]知,Ir及Imx有關係式分別為
Ir =Ir0[1+γrcos(2πΔvt)] (1) 及
Imy=Im0[1+γm cos(2пΔvt-Φ)]。 (2)
其中,Ir0及Im0為信號背景光強、γr及γm為信號對比度、ΔV=V1—V2、及
Φ=V。 (3)
注意(3)式中的V是指,反向反射鏡CC2隨平移台沿y軸移動的距離;而(1) -(3)告訴我們,只要能粹取出Ir及Imy的相位差Φ,我們便能解出受測平移台的位移。
相位解調模組的功能是,粹取出Ir及Imy的相位差Φ,並依(3)式輸出位移V。
● 橫向位移量測干涉模組
如圖2(a)所示,縱向位移量測干涉模組和橫向位移量測干涉模組的差異僅在干涉儀模組,它包含一非偏極分光鏡、一Wollaston稜鏡、一V型反射鏡、及一光接收器;其中Wollaston稜鏡被固定在受測平移台上,隨該平移台沿y軸移動。來自雙頻光源的雙頻雷射穿過非偏極分光鏡後,Wollaston稜鏡處被分為垂直及水平線偏極光兩束,且它們個別和y-軸夾 角;垂直及水平線偏極光來到V型反射鏡後,被反向反射回Wollaston稜鏡處,重新合併;最後,合併光束被引往光接收器,以偵測出它們的量測信號Imx,它俱以下關係[13]:
Imx=Im0[1+γmcos(2πΔvt-Γ)] (4)
其中
回文章內容列表更完整的內容歡迎訂購 2018年11月號 (單篇費用:參考材化所定價)
主推方案
無限下載/年 5000元
NT$5,000元
訂閱送出