- 回首頁
- 機械工業雜誌
- 歷史雜誌
摘要:產業朝向智慧製造發展,執行重複動作之現場人員未來將徹底被智慧機器取代。目前自動化應用仍存在一些問題:(1)需由現場人員先將工件整齊排放,再由機械手臂抓取;(2)離線編程軟體產生之路徑需現場人員視加工結果進行調整;(3)因工件位置誤差、刀具磨耗等原因而難以達到良好的加工結果。本文將發展智能化應用模組,解決自動化應用問題,達到加工品質預測、路徑生成、隨意擺放工件之上下料及誤差自動校正,並將各模組整合開發齒輪邊角自動研磨系統,以解決目前齒輪加工後需人工研磨之問題並提升加工效率。
Abstract:The manufacturing industry is moving toward intelligent manufacturing, in which intelligent machines will replace workers to perform repetitive tasks. Currently, there are still some issues with the automation applications: (1) it is necessary for workers to neatly line up workpiece before robot arm can grab the workpiece; (2) the routing path created by offline programming software needs to be adjusted accordingly to the workpiece condition by workers on factory floor; (3) it is difficult to achieve good machining quality due to workpiece positioning errors, tool wear and so on. This paper focuses on the development of intelligent automation modules to solve automation application problems, including predicting machining quality, automatic routing path generation, random picking, and automatic compensation of errors. In addition, this paper integrates the modules into an automatic gear edge grinding system to solve the problem of needing additional manual grinding after gear machining, and also aims to improve the machining efficiency.
關鍵詞:智動化應用模組、自動化研磨應用、自動校正技術
Keywords:Intelligent automation module, Automatic grinding application, Automatic calibration technology
前言
隨著科技的進步與演進,工業自動化已經成為企業所追求的目標,不僅可縮減人力,亦可提升產品品質及安全性;近年來機械手臂的使用率有逐年攀升的趨勢(根據國際機器人聯盟IFR預測:2020年全球機器人使用量將達321.8萬台,如圖1所示[1]),憑著工時長、高重複精度、低失誤率、增加產能等優點,在工業自動化扮演著舉足輕重的角色。
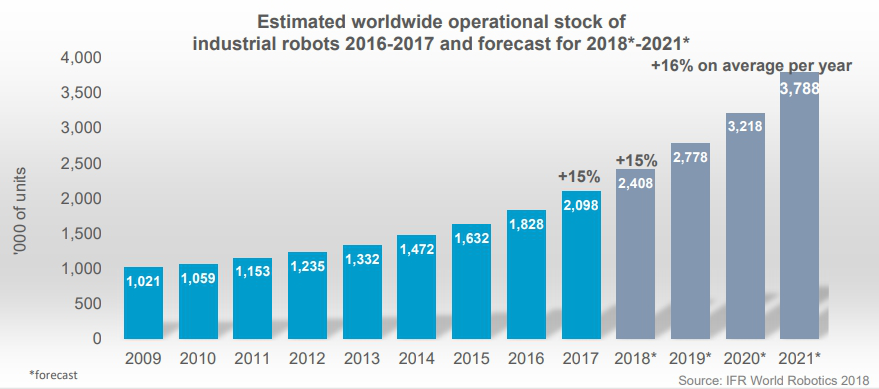
圖1 2018年機器人使用量統計與預測
在機械手臂應用領域方面,根據高工產研調查報告指出,2017年應用在搬運碼垛領域的工業機器人銷量分佈超過35%,連續多年成為工業機器人的第一大應用領域。對於碼垛應用而言運動路徑可直接透過人工教導的方式產生;但除了自動化上、下料外,機械手臂亦有高階自動化之應用,如研磨、焊接、噴塗等。以打磨機器人而言,2017年中國打磨機器人產值已達24.2億人民幣,預估2020年將超過85億元[2]。
對於高階自動化應用而言,加工路徑相對複雜,很難透過人工教導的方式產生,而必須透過離線編程軟體輔助[3]。雖然目前市面上已經有一些離線編程軟體可以使用,但自動化應用大多存在以下問題:(1)需將工件先整齊排放於萃盤或定位裝置,才可由機械手臂夾取或加工;(2)離線編程軟體產生的路徑需於實際加工時視加工品質進行調整;(3)因工件定位誤差、刀具磨耗等原因使路徑規劃結果須經人工微調後才可使用。為了改善以上問題,本文將開發智能化應用模組,整合機械手臂運動特性分析[4][5]、加工品質分析[6]及自動誤差校正技術[7],達到加工品質預測與路徑生成[8]、隨機擺放工件上下料[9]、誤差自動補償,並將各模組整合開發齒輪邊角自動研磨系統,將滾齒後研磨修邊工序導入自動化,降低人力需求並提升加工效率與品質。此系統於自動化應用規劃階段時僅需輸入工件模型、並選擇工法後,系統即可自動產生運動路徑並顯示加工品質預測結果,供使用者依加工預測結果修正路徑。當完成規劃後,使用者即可根據分析結果進行工站建置,使用時僅需將工件任意擺放後,即可透過自動誤差校正模組將工件夾取並對正加工軌跡、修正刀具磨耗等,加工完成後並自動將工件整齊排放。
智動化應用模組
本節將說明所開發之智動化應用模組,其中包含根據機械手臂運動特性與工法品質預測產生最佳加工軌跡、透過機器視覺開發自動誤差校正技術補償工件位置誤差與刀具磨耗等。
基於加工品質預測結果之最佳路徑生成模組:以機器手臂執行高端自動化應用時皆須透過CAD/CAM模擬來分析其行為並產生運動命令;但現有的機械手臂路徑生成軟體所產生的路徑,需使用者於實際加工時視加工品質調整。本文將發展一套系統快速分析奇異點、關節限制、碰撞及研磨加工品質等特性,並產生運動路徑,協助使用者快速建立機械手臂之工站配置分析、路徑生成等。
自動誤差校正模組:機械手臂於實際加工應用時,容易因工件定位誤差或刀具磨耗等,使軟體產生的路徑無法使用。本文將發展一套自動誤差校正技術,自動辨識工件位置、自動對正加工軌跡、工具安裝之校正、補償磨耗所產生之誤差等,並建立隨機取料技術,使工件可以隨意擺放之方式供料,由視覺辨識位置並自動取料後進行誤差校正以確保路徑精度與加工品質。
使用者將欲加工的工件模型輸入至路徑生成模組後,系統即可自動產生運動路徑並顯示加工品質預測結果,供使用者依加工預測結果修正並產生最佳路徑。而後,使用者即可根據分析結果建置工站並利用自動誤差校正模組補償工件與工具誤差,使機械手臂可夾取隨機擺放的物件、對正加工軌跡、修正刀具磨耗等,並於加工完成後將工件整齊排放以進行下一工序。
更完整的內容歡迎訂購 2019年03月號 (單篇費用:參考材化所定價)
主推方案
無限下載/年 5000元
NT$5,000元
訂閱送出