- 回首頁
- 機械工業雜誌
- 歷史雜誌
[本期最優良文章] 基於視覺停車格偵測與多階段控制之自動停車系統開發
作者 李則霖、詹聖瑋
刊登日期:2019/04/01
摘要:隨著當前汽車無人駕駛技術日新月異的發展,國內外車廠紛紛投入汽車無人駕駛技術的研發,其中,自動停車技術為當前重要發展標的之一。而現有半自動停車系統,多採用距離感測器偵測停車空間,需要依賴鄰車以定位停車空間,造成使用者在僅有地上標線的停車格進行停車且該停車格兩旁無鄰車可協助偵測時,反而造成停車不易的現象。本文利用基於視覺的停車格偵測系統,用於即時處理和識別車格線,以提供車輛和格線之間的相對空間資訊。使用基於視覺的算法不需依賴周遭參考障礙物。我們還將視覺資訊與其他感測資訊整合在一起,以改善性能,分析環境和車輛狀態後,制定適當的自動停車規劃。然後,處理器控制車輛的致動器,使自動駕駛車輛能完成垂直,平行和斜向車格的停車任務。因此,本文解決了在沒有參考障礙的情況下在車格邊線區域停車的問題。
Abstract:With the rapid development of current autonomous driving technology, domestic and international car manufacturers have invested in development of autonomous driving technologies, among which, automatic parking technology is one of the current important development targets. In the existing semi-automatic parking system, the distance sensor is often used to detect the parking space, and neighboring vehicles are required to locate the parking space, so that it’s not easy for users to park in a parking space without neighboring vehicles but only with the ground markings. This article is based on the vision-based parking detection system for instant processing and identification of grid lines to provide relative space information between vehicles and grid. Using vision-based algorithm wouldn’t be limited by neighboring vehicles. We also integrate visual information with other sensing information to improve the performance, and help determine appropriate automatic parking plan by analyzing environment and vehicle status. The processor then takes control of the vehicle’s actuators, making auto vehicles to complete parking missions for perpendicular, parallel, and oblique grids. As a result, this study solves the issue of parking in a grid-painted region without reference obstacles.
關鍵詞:視覺偵測、機器學習、自動停車
Keywords:Vision-based detection, Machine learning, Auto parking
前言
對於大多數駕駛員來說,安全且適當地將車輛停放在停車格是一個耗時且麻煩的問題。近年來,市場上的一些車輛已可選配停車輔助裝置,以通過指示駕駛軌跡或其他用於駕駛參考的裝置來減少停車的難度。但對於某些人來說,即使有輔助線,由於操控不當,仍可能無法順利停放。大多數現有的自動停車系統基於深度感測器(超聲波、雷達等)實現停車位偵測和制定相應的停車策略[1]。然而,由於基於深度的方法本身對於空間邊界判斷的要求,如果沒有相鄰的汽車或周遭的障礙物,此類系統無法順利運作。如果鄰近的車停在車格外,他們也會相應的停歪。
在車格偵測方面,一些方法旨在偵測長邊車格線[2] [4],有些則是偵測停車格的短邊[3]。一些方法使用線條顏色作為偵測停車格的主要特徵[5] [6]。而有些人則使用機器學習分支中的神經網絡來劃分線條顏色[6]。
路徑規劃是自動停車系統的關鍵技術之一。許多研究通過幾何計算來計劃弧形路徑[7]。在垂直停車的情況下,四分之一圓路徑的一步驟停車被廣泛使用[8]。一些研究[9]開發了基於感測器(例如超聲波感測器)的停車方法,沒有預先規劃明確路徑,而是在過程中根據障礙物調整車身姿態。在[10]中,他們通過超聲波感測器,弧形路徑規劃和主動控制的組合,在特定情況下實現自動停車。
本文利用基於視覺的停車格辨識系統,用於即時處理和識別車格線,以提供車輛和格線之間的相對空間資訊。使用基於視覺的演算法不受鄰近車輛的限制。停車位僅由車格線標識。然而,視覺感測方法可能遇到偵測距離和角度方面的限制,因此不能在整個停車過程中提供穩定的資訊。因此,我們將視覺資訊與其他感測資訊相結合,以改善性能,分析環境和車輛狀態後,制定適當的自動停車規劃。根據規劃,處理器控制車輛加速,制動,轉向,換檔使自動駕駛車輛完成垂直,平行和斜向車格的停車任務。因此,本文解決了在沒有參考障礙的情況下在車格邊線區域停車的問題。
基於視覺的停車格偵測系統
在感測上,我們提出了一種基於視覺的停車格偵測系統,該系統有兩部分:車輛硬體配置和停車格標記偵測方法。
1. 硬體配置
硬體配置的一個特點是攝影鏡頭,四個攝影鏡頭安裝在車輛周圍以捕捉來自周遭環境的影像。這些攝影鏡頭連接到處理器以運行停車格偵測方法。偵測結果不僅可以在螢幕中顯示,還可以通過CAN傳輸到處理器以供制定控制策略。
2.停車格偵測方法
本節將討論提出的停車格偵測方法,其流程圖如圖1所示。車上處理器內含此演算法,它使用預先設定的車輛尺寸和攝影鏡頭內部/外部參數來定位和調整停車格的空間數據。我們提出的方法支持兩種停車格偵測:平行與垂直。
如圖1所示,首先輸入一個鏡頭的影像。接著藉由離線訓練的偵測器辨識停車格的左/右角點特徵。第三,將左右角點特徵根據已知條件(例如: 車輛尺寸) 匹配為候選組合。第四,判斷候選組合是否為停車格,其僅使用注意區域(ROI)中的影像來降低計算複雜度。最後,輸出每個識別的停車格的空間數據,該數據通過幾何變換形式估算。
停車格追蹤(如圖1框線處)是可選的額外步驟。採用此步驟後,偵測精度提高了約3.2%。偵測停車格左/右角特徵的流程圖如圖2所示。這部分我們通過機器學習實作偵測器來偵測停車格的左/右角特徵。藍色區塊是建立偵測器的離線訓練流程,綠色塊是即時偵測階段,以提取影像中的左/右角特徵。
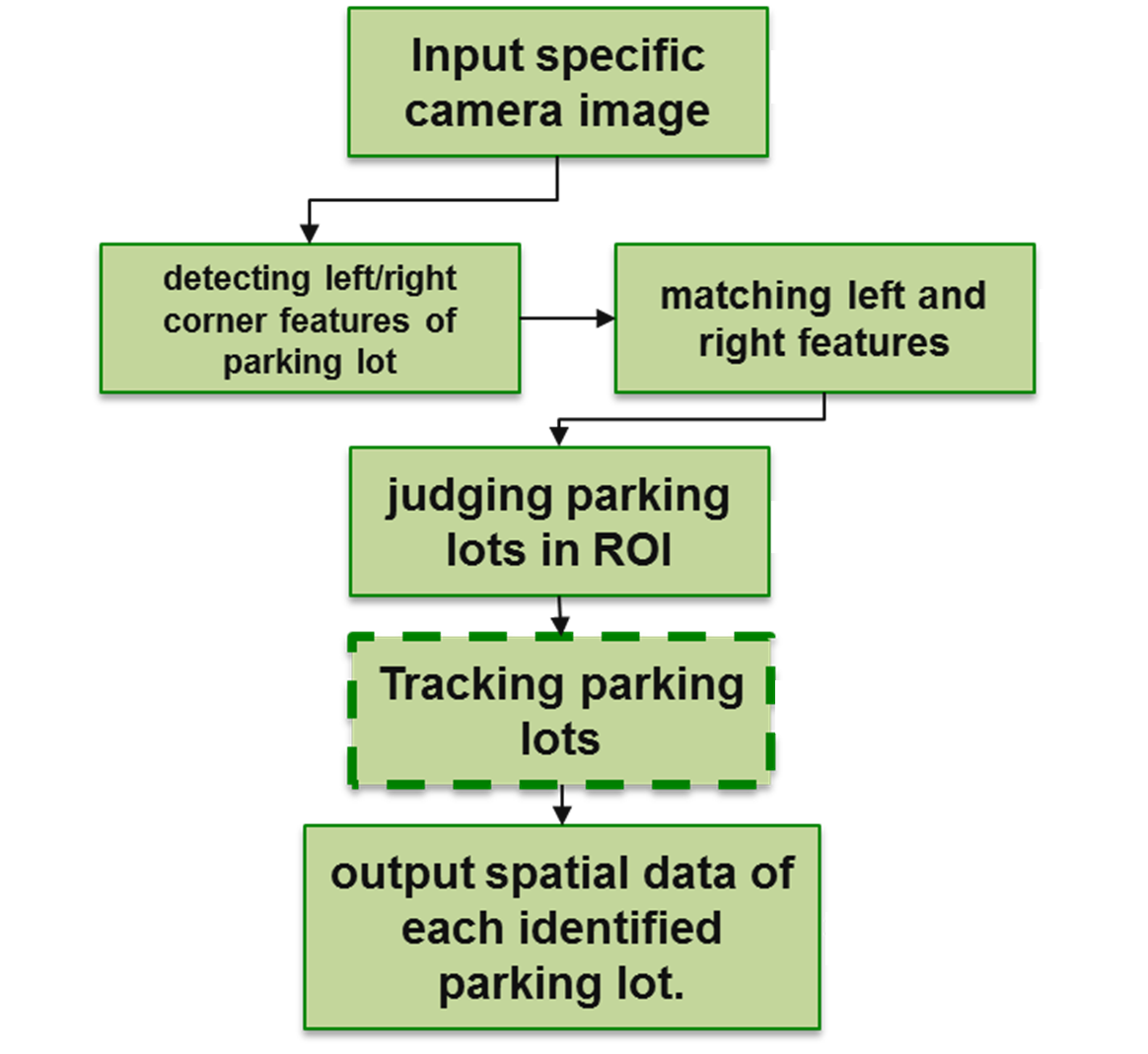
圖1停車格偵測方法流程圖
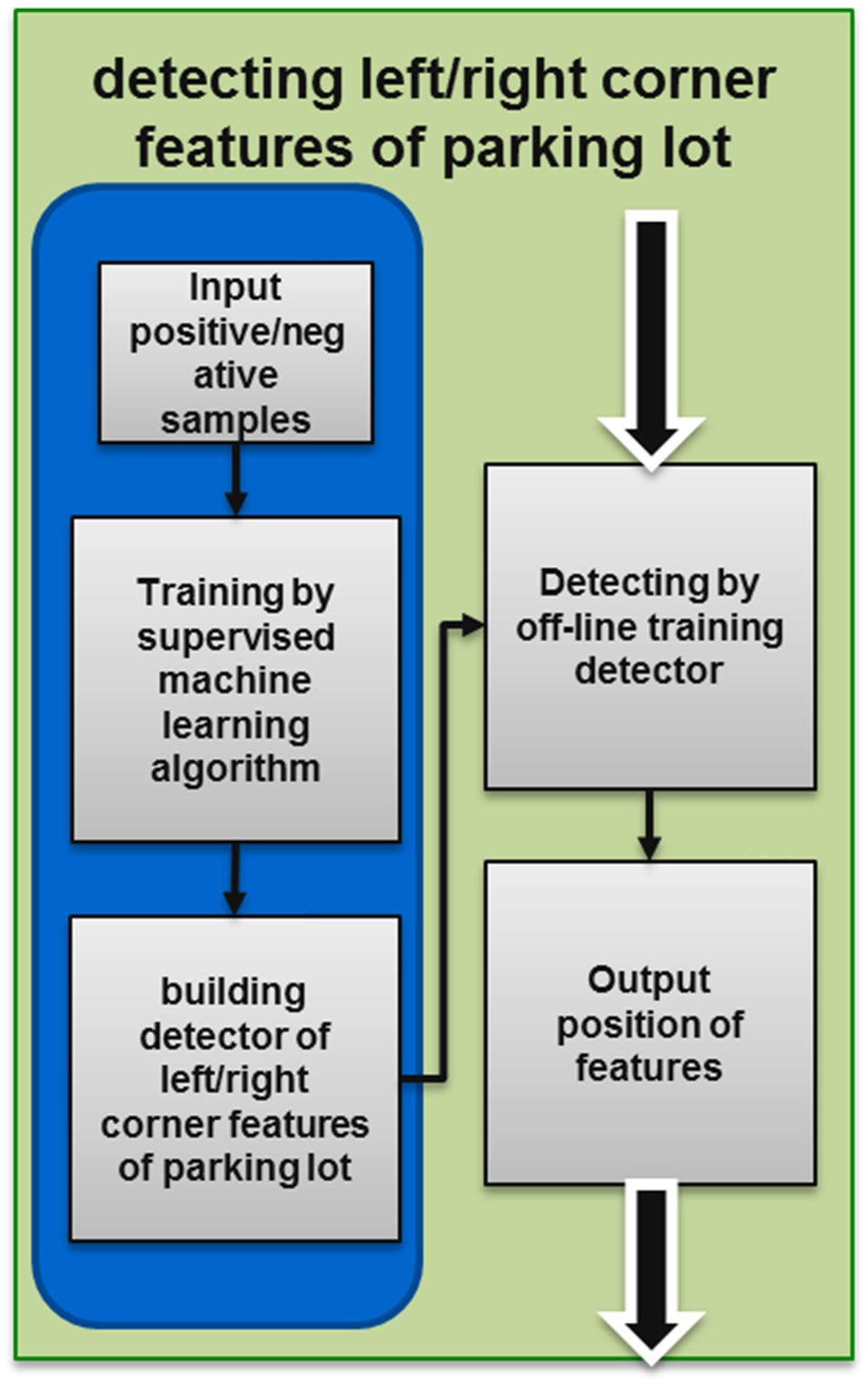
圖2 偵測車格左右角點流程圖
回文章內容列表更完整的內容歡迎訂購 2019年04月號 (單篇費用:參考材化所定價)
主推方案
無限下載/年 5000元
NT$5,000元
訂閱送出