- 回首頁
- 機械工業雜誌
- 歷史雜誌
摘要:啟發自生物界螞蟻雄兵的協同合作搬運, 期望讓工廠用的自動導引載具能夠打破尺寸大小的限制,協同組合工作,提升工廠自動化、產線上的彈性。此研究設計一個主從編隊的控制架構,能夠讓多機器人維持隊形,並同時移動至目的地。最後,以機器人作業系統(Robot Operating System, ROS)與Gazebo平台模擬、驗證其結果。
Abstract:Inspired by the collaboration of ants in nature, it is expected that Automated Guided Vehicles (AGVs) used in factories can break the size limit and work together to improve the flexibility of factory automation and manufuacting. In this study, a leader-follower formation control architecture that allows multiple robots to maintain a formation and to move to the destination at the same time is developed, discussed and validated. Finally, Robot Operation System (ROS) and Gazebo simulator are adopted to verify the proposed control architecture. The simulation results with the proposed method demonstrate the formation control performance.
關鍵詞:多機器人、編隊控制、機器人作業系統
Keywords:Multi-robot, Formation control, Robot operating system
前言
多機器人系統(Multi-Robot System, MRS)通常比單機器人系統多一些優勢,例如:少數模組或部分機器人故障時不容易導致整體任務中止,可因應任務或環境變化調節或組織不同執行功能。這讓許多複雜的應用問題獲得更多彈性解決方案。
在1980年代早期的研究中,研究人員開始透過觀察模仿自然界的蜂群、蟻群或是探討人類之間如何共同執行任務而提出各種演算法。這些早期研究促使多機器人系統得以實際應用於許多不同領域中,如監視、搜索和救援、收集、探索、協同搬運等。
參考[1]將多機器人的應用分為六大領域:
‧ 監視、搜索與救援
隨著無人機(Unmanned Aerial Vehicle, UAV)的發展,多機器人監視應用的範圍逐漸由室內擴展至偏遠山區或海上。近年來諸多地震、海嘯及核能事故都可見到研究人員使用先進的多機器人系統進行搜索和救援。
‧收集和群體行動
大範圍隨機分佈於不規則地表的物件通常無法使用大型機具進行系統化有效率的收集任務。此時多機器人系統模擬蜂群覓食特性的集群智慧(Swarm Intelligence, SI)演算法便可發揮作用。例如基於粒子系統(Particle system)的類鳥群(Boids)行為規則模型使得多機器人系統中的成員在群體行動中可以遵循方向並與群體保持距離避免碰撞。
‧編隊和分佈
在編隊應用中,機器人團隊必須保持一些嚴格的安排,同時避開其路徑上的障礙。這個問題變得比群體行動更複雜,因為必須集體編隊避免障礙。而分佈應用恰與編隊相反,團隊中的機器人必須將自己最佳分佈在未知環境中以探索該區域。
‧ 多機協同操控
如圖 1,多機器人協同移動物品或共同運載大型物件的應用幾乎是多機器人系統同義詞。這一類任務需要在機器人團隊間進行非常高速穩定的通訊行為以取得大量感測器資訊回饋以確保物體姿態與移動軌跡符合路徑規劃。
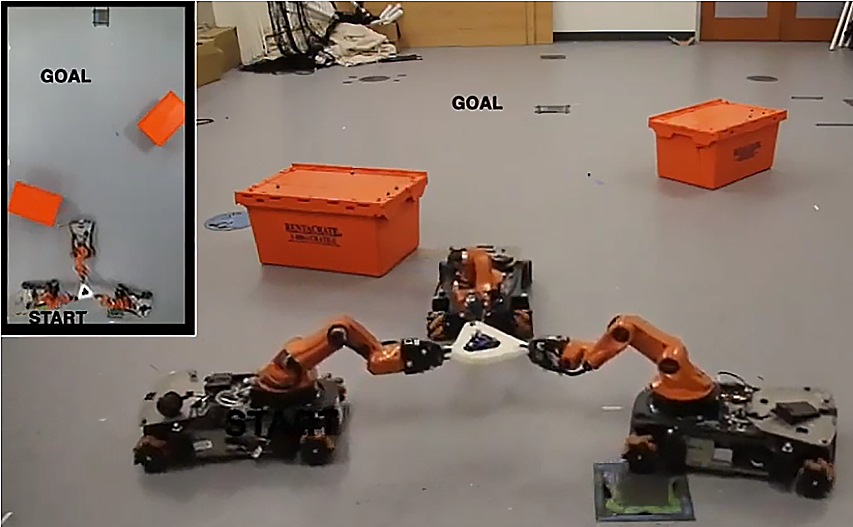
圖 1 多機器人協同搬運[2]
‧ 異構團隊合作
一個具有許多不同機型與功能的多機器人系統可稱之為異構團隊。系統有效利用不同機器人隊員的各種功能執行複雜任務。例如雙足、四足或輪型地面移動機器人可以搭載無人機進行合作任務,便可有效擴大搜尋視野與加速搜尋速度甚至,擴大無線通訊網域捕捉微弱求救訊號,而地面機器人可以擔任運送更高荷重物資的角色並成為無人機的充電基地。
‧對抗式環境
RoboCup於1997年成立,主旨是促進機器人和人工智慧的研究。該聯盟運用機器人團隊進行足球競賽已有效發展成許多對抗環境的研究主題。在對抗其它團隊任務中,每個機器人會被分配不同任務與技能,並依據戰略與環境變化協調團隊成員間的活動。
自2013年以來工業4.0描繪的未來工廠情境及2014年由全球大型電商亞馬遜所引發的智慧倉儲機器人風潮,未來的世界將會仰賴數量更龐大的多機器人系統,而集群機器人(swarm robot)在未知的環境下依然能夠協力組合成給定的形狀,啟發了本研究[3]。試想工廠的自動導引載具(Automated Guided Vehicle, AGV)能夠像工人一樣,成為工廠中的最小元件。當今天生產線中的貨物,無法由單一台車(工人)搬運時,另外一台車(工人)會一起過來幫忙。如此一來,工廠的自動化將變得更有彈性、效率。然而,要能夠讓多台機器人能夠協同工作,其所面臨到的工程問題有幾項:定位問題、控制問題等。
在組織形狀時,機器人必須要知道自身的位置是很重要的。然而,AGV通常是在室內作業,無法擁有全球定位系統(Global Positioning System, GPS)來輔助定位,故如何利用周遭的標的(anchor)、附近機器人的資訊來得知機器人自身的位置為許多學者專注的研究[4][5]。
差速型的載具由於其運動模型簡單、控制簡單、成本低廉等優點,在工業、研究上受到廣泛使用。而單一台載具移動上所需要的控制目標不外乎就是循跡與避障[6],然而,要完成多車搬運的問題,還必須要加入編隊控制(Formation Control),許多學者利用主從編隊(Leader-Follower)控制方法,將AGV中的其中一台車設為引領車(Leader),其他台車為隨從車(Follower),隨從車會依照引領車的速度、角速度、與其之間的距離、角度的資訊來設計控制器[7]-[9]。
更完整的內容歡迎訂購 2019年07月號 (單篇費用:參考材化所定價)
主推方案
無限下載/年 5000元
NT$5,000元
訂閱送出