- 回首頁
- 機械工業雜誌
- 歷史雜誌
自駕車隊列行駛技術發展現況
作者 沈怡如
刊登日期:2021/01/01
摘要
從自動駕駛到真正的無人駕駛,智慧車輛實現完全自動化過程仍有許多挑戰,涉及領域涵蓋自動化技術、軟硬體、通訊環境、基礎設施佈建、駕駛與乘客行為、公眾接受度、責任歸屬、保險、法規等許多議題,與一般乘用車相比,於急迫性、重要性與可行性上,商用車市場的技術應用受到重視。隊列行駛技術發展,有望解決物流運輸現有的人力短缺、運輸效率及環境污染等營運問題。本文將針對隊列行駛之全球市場及技術發展趨勢等進行介紹。
Abstract
From autonomous vehicles to truly driverless vehicles, there are still lots of challenges have to be conquered. The technical issues are covered with various fields such as automation technology, hardware and software, communication environment, infrastructure deployment, driving and passenger behavior, public acceptance, attribution of responsibility, insurance, regulations and many other aspects. Compared with conventional passenger vehicles and taking into consideration of the urgency, importance, and feasibility, the technology application in the commercial vehicle market should be valued. The development of platooning technology is expected to solve the existing operational problems of logistics and transportation such as labor shortage, transportation efficiency and environmental pollution. This article will introduce the global market and technology development trends of platooning technology.
隊列行駛
隊列行駛,指的是使用通訊與自動駕駛技術,讓兩部或兩部以上車輛進行鏈結,車輛間透過設定,保持一定距離,達到一致行駛速度與型態。例如行駛於高速公路上的貨運卡車,第一部卡車作為領導者,後面的車輛可跟隨並適應其運動變化,後方駕駛也可以決定離開隊列並獨立駕駛。發展目標主要為提高道路安全、改善交通問題、提升運輸效率與減少環境負擔等。
在整體運輸系統中,除了人的移動,物流運輸亦為重要一環,隨全球經濟活動與市場開放,網路資訊化時代與生活型態轉變,電子商務市場持續擴張,物流運輸業需求逐年攀升;然而,物流運輸業面臨專業駕駛短缺、工時限制、運輸安全及對環境造成影響等問題,許多挑戰亟待解決。智慧車輛新興科技如自動駕駛、車聯網發展對產業帶來解決方案契機,隊列行駛技術為其中關鍵應用。
全球市場概況
根據市場調查機構Maximize Market Research發佈之研究報告[1],2019年卡車隊列市場規模為663.39百萬美元,預計2027年將成長至4378.97百萬美元,年複合成長率達26.61%;人為因素造成的事故以及對運輸與營運成本關注的增加,帶動整體市場需求,未來隊列行駛技術發展亦將推動如道路建設、運輸、物流、資通訊技術等領域需求,交互整合下,使道路運輸環境更加安全、高效及潔淨。
目前全球市場分佈概況以歐洲、北美及亞太地區為主,2019年歐洲市場規模為205.32百萬美元、北美為154.5百萬美元、亞太地區則為144.42百萬美元;根據預估2027年歐洲市場規模為1382.88百萬美元、北美為992.71百萬美元、亞太地區則為1004.10百萬美元,將超越北美躍昇為全球第二大市場。
技術發展趨勢
自動駕駛發展過程中,要實現美國SAE自動化等級四以上需求,實際上仍有一段路要走;等級四以上之自駕車,也就是在條件許可下,車輛可完全自駕,駕駛人不需介入操控,達高度自動化程度;而隊列行駛可說是目前發展進程中主要發展方向之一,可整合現有自動化技術並有效解決現有運輸問題。隊列行駛中的車輛,車間可維持相較於人為控制更小的車距,後車自動跟隨前車行駛,車輛間可同步統一加減速、制動,後車駕駛無需時刻緊抓方向盤或控制油門煞車,有效降低駕駛疲勞,長途駕駛時,未來也有可能只需領導車輛需配有駕駛員。由於車距縮小,後車風阻降低,同時達到了釋放道路容量以及燃油消耗的實際效益,荷蘭研究機構TNO(Netherlands Organization for Applied Scientific Research)報告也指出,卡車隊列行駛後可降低10-15%的燃油消耗。而安全性的部分,車輛具通訊功能,在緊急狀況下,系統可直接控制車輛,縮短反應時間。
歐盟委員會(European Commission, EC)在2009年資助SARTRE(Safe Road Trains for the Environment)計畫,可說是隊列行駛技術研發開端,計畫目標為建立重要概念,開發及驗證隊列行駛技術為增加安全性並減少排放量的優良解決方案。2016年,荷蘭為歐盟主席國期間發起「歐洲卡車隊列行駛挑戰」(European Truck Platooning Challenge),共有六家廠商(DAF Trucks、Daimler Trucks、 Iveco、MAN Truck & Bus、Scania、Volvo Group)參與,以各城市為起點,荷蘭鹿特丹為終點,跨國家跨團隊合作,關注技術實現、基礎設施與法規等面向,其中行駛距離最遠(達2,000公里)的Scania,從瑞典出發並跨越四個國家,最終所有團隊皆安全抵達終點。在自動駕駛、車聯網技術突破下,此競賽同時也加速了隊列行駛技術發展進程與實現。
主動式定速巡航(Adaptive Cruise Control, ACC)、自動緊急煞車(Autonomous Emergency Braking, AEB)、盲點警示(Blind Spot Warning, BSW)、前方碰撞警示(Forward Collision Warning, FCW)、全球定位系統(Global Positioning System, GPS)、人機介面(Human Machine Interface, HMI)、車道維持輔助(Lane Keep Assist, LKA)等系統支持隊列行駛技術發展,結合從攝影機、雷達、光達等感測器數據,透過車聯網技術進行通訊,以達到車輛間相互連結成一系統並可同步運動之狀態。以下將針對歐洲、美國、日本、中國等代表性國家,介紹其技術發展現況與相關道路測試計畫:
1.歐洲
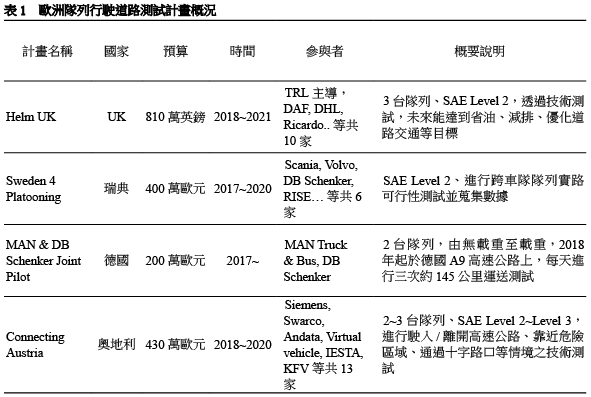
歐盟整體目標為2020年可逐漸在道路上實施2至3輛卡車之隊列行駛,2023-2025年,希望在歐洲高速公路上能實現多品牌、跨車隊車輛在歐洲的高速公路上行駛,不受國界限制;接著則可考慮後車駕駛於行駛過程中擁有休息時間,未來則達到全自動駕駛卡車的目標。以技術、法規兩面向切入,技術面除了強化關鍵技術外,需陸續進行測試及驗證,並配合物流業者進行,於實際營運情境上進行解決方案的研究;法規面則從歐盟各國支持進行跨境整合,透過市場激勵政策如減稅、降低排放量獎勵等,並且針對交通法規、跨境許可等方面進行審查與調整。相關道路測試計畫如表1所示。
2.美國
美國GDP組成中消費項目占比超過六成,包含零售銷售與服務銷售,貨運業自實體零售時代就扮演推動美國經濟成長重要角色,公路亦是長年來美國重大建設項目;在電商強勁動能下,物流運輸需求與壓力漸增,2018年10月美國卡車運費年增10.4%,創十年來新高,背後的缺工問題來自於長工時、疲勞駕駛以及貨運的駕駛事故。美國國家公路交通安全管理局(National Highway Traffic Safety Administration, NHTSA)與國家運輸安全委員會(National Transportation Safety Board, NTSB)等政府機構希望透過自動駕駛技術,有效促進道路駕駛安全,截至2019年,已有27州政府允許進行自動駕駛相關技術的商業佈署。
更完整的內容歡迎訂購 2021年01月號 (單篇費用:參考材化所定價)
主推方案
無限下載/年 5000元
NT$5,000元
訂閱送出