- 回首頁
- 機械工業雜誌
- 歷史雜誌
摘要
工業設備之間透過物聯網達到互聯已成為工業4.0重要的議題,統一的通訊標準使設備間達到互通,不僅可以減少設備整合的困難度、降低成本、同時可以提升設備的市場競爭力。本文將介紹工研院機械所團隊依產業需求建立工業型機器人專屬之OPC UA資訊模型、驗證方法與成立機器人通訊聯盟,至終使機器手臂與其他設備間達到通訊連結與協作的目的;該開發團隊已在PCB產業方面建立產業通訊標準SECS/GEM與驗證方法,更進一步與合作廠商完成設備聯網之規劃與建置。
Abstract
Connecting industrial equipments through IoTs (Internet of Things) has become an important issue in Industry 4.0 . Defining a unified consistent communication standard enables diverse equipments to interconnect, which not only minimizes the effort and cost of equipment integration but also improves the equipment's market competitiveness. The robotics research team at Industrial Technology Research Institute (ITRI) established an OPC UA information model and verification method for industrial robots. This team also help the establishment of a robotic communication alliance based on the information model. The robot information model that communicates with PCB industry’s existing SECS/GEM communication standard has been developed and will be tested by ITRI’s industrial partners.
前言
近年來工業設備之間為了透過物聯網達到互聯,開放平台通訊統一架構(OPC UA)[1]已是現今工業自動化的通訊標準,機器人與其他設備(如:CNC)之間的通訊,具有規範資料交換的安全性、可信賴性、以及跨多種平台等優點。OPCUA通訊標準解決了機器人與設備資訊不相通的問題,並可呈現產線作業的即時資訊。位於德國安貝格的西門子智慧工廠,為搜集準確的數據,該工廠內超過3億個元件都有屬於自己的身分證,用以識別出材質、生產環境條件等,並透過資訊系統控制和優化,以確保達到逼近100%的產品合格率。西門子將虛擬與真實的工廠並行,透過虛擬工廠反映出真實工廠生產時的資料與數據,而員工則透過虛擬工廠來監控真實工廠的運作。於1996年8月由OPC協會所制定OPC(OLE for Process Control)的工業標準即可應用在設備的資訊取得,此標準是由全球頂尖的自動化軟、硬體公司與微軟公司共同合作的技術結晶,採用主從式(Client-Server)的架構處理資訊傳輸,也就是藉由一個稱之為OPC Server介面的元件,建立與OPC Client交換資訊的管道,達成資料傳遞與分享的功能。
因此,在面臨工業製程複雜化、美國網路巨頭跨入實體經濟等威脅下,德國憑藉著工業領域的技術優勢,將網路技術與智慧製造技術相結合,率先提出「工業4.0」願景。接著,德國電工委員會(DKE, Deutsche Kommission Elektrotechnik Elektronik Informationstechnik)於2015年4月發布工業4.0參考架構模型(RAMI 4.0, Reference architecture model for Industrie 4.0)[2,3],以此架構說明產品生命週期、企業組織結構、技術環節的交互關係,如圖1所示。

圖1 RAMI 4.0 架構 [2,3]
RAMI 4.0架構模型有3個維度:
1.第一軸(生命週期軸): 涵蓋系統開發與導入生產。最重要的階段就是研發藍圖(Type)與實做/具體生產(Instance)。牽涉到的東西有: 研發, 設計, 製圖, 模擬, 計算, 原型, 組裝說明, 維修手冊, 產品參數, 序號, 使用手冊, 定期保養手冊, 銷毀與回收資訊。
2.第二軸(結構軸): 簡單講就是從實體到數位化虛擬的各階段。主要的組成內容有: 實體物品,數位化轉換,通訊,資訊,功能,組織與商務訂單處理。
3.第三軸(工廠軸): 從產品, 工具元件, 控制器, 機台設備, 生產群, 工廠最後到世界; 在工業3.0中前述的各部件都沒有互相連網, 近似獨立的孤島; 在工業4.0的概念下功能採分散式各個部件全部互相溝通聯網, 跨階跨公司通訊互通資訊, 整個網路購成一個完整產品。各部件具有其功能透過管理殼與網路裡各個部件互動交信交流以達成特定大大小小任務。
現今,工業型機器人在各式加工應用中使用已大幅提升,機器人與其他工業設備之間透過物聯網達到互聯是工業4.0重要的議題之一;藉由統一的通訊標準能使設備間達到互通,不僅可以減少設備整合的困難度、降低成本,同時可以提升設備的市場競爭力。OPC UA被視為實現的工業互聯網及智慧工廠的重要通訊標準,其所定義的資訊模型涵蓋RAMI 4.0架構中的資訊層及通訊層,透過定義通訊模型使各端點之間得以傳輸資料;以資訊模型標準化資料的結構、行為和語義;以訊息模型實現應用互通;透過定義各式模型達成系統間的互操作性,在智慧製造場域中實現設備及系統間資訊綜合互通。
機器人與設備互通架構
工研院機械所團隊藉由自行開發的工業型機器人,參考過去在產線上的應用需求,建立工業型機器人OPC UA資訊模型,讓機器人能與其他協作的製造設備(例如:工具機)之間進行互聯。在設計規劃階段機器人控制器部分,必須能夠支援OPC UA通訊,如圖2控制器作為OPC UA的Server端,為資訊(模型)內容所在,Client端(可能為工具機或PC),對控制器下訂閱命令,當(Server端)訂閱的事件發生時對Client發佈資訊,使Client端獲取所訂閱的資訊。
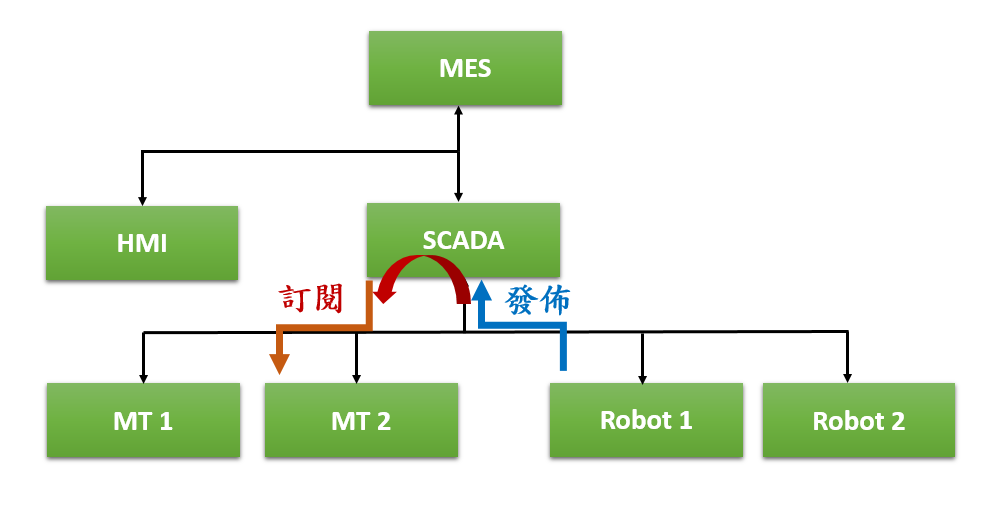
圖2 機器人與設備溝通方塊圖
控制器內部的軟體架構如圖3,透過機器人控制程式取得機器手臂的資訊,依照所訂定的資訊模型,將機器手臂資訊轉換成資訊模型的資料格式,再透過OPC UA標準的通訊界面,發佈給Client端。
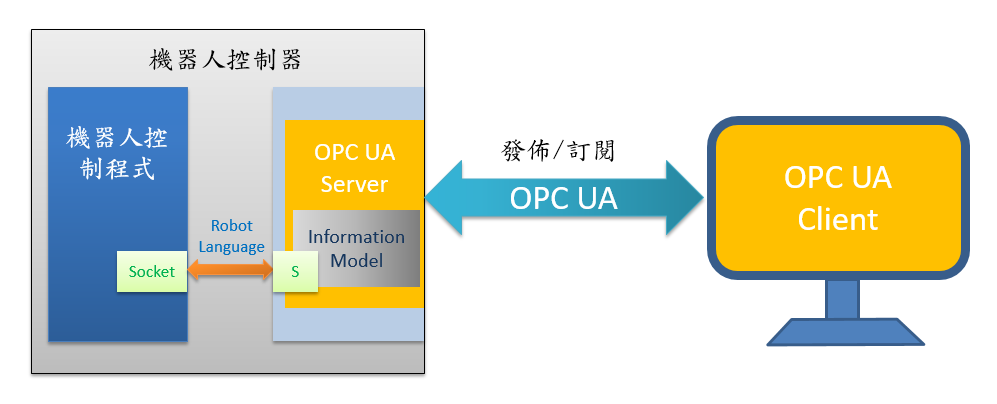
圖3 機器人控制器支援OPC UA通訊架構圖
機器人資訊模型開發之工作內容如圖4,首要之務為機器人控制程式須整合OPC UA通訊程式。參考國際標準組織(例如:VDMA)訂定資訊模型,期能與國際接軌。實作完成後作單機互聯測試,若無問題再與設備連接做互聯整合測試。
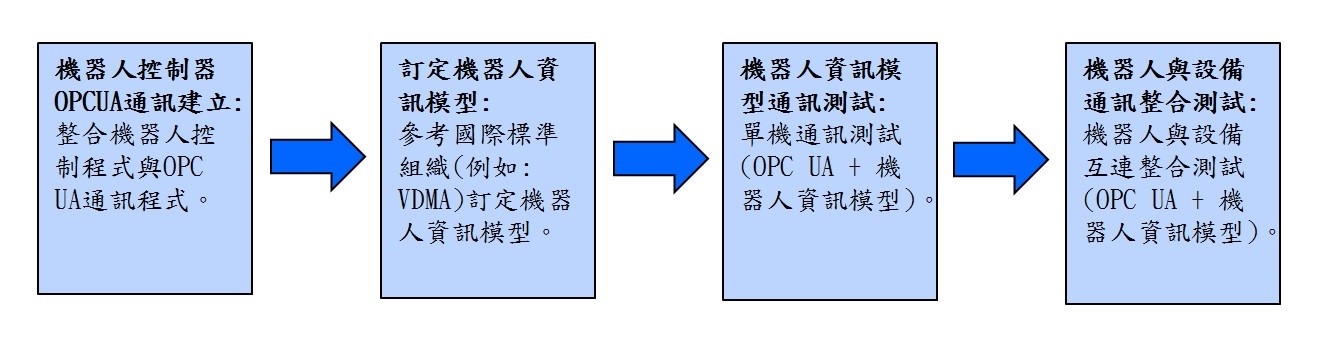
圖4 機器人資訊模型開發流程
工研院除了自行研發的機械手臂可與工具機訊息互聯,更進一步讓機械手臂之間訊息互通以達成協作目的,OPC UA機器人通訊標準技術提供標準化的資訊模型(Information Model),能夠以統一的方式呈現所有機器人相關的數據。基於OPC UA通訊架構的資訊模型,為國內機器人產業提供與國際標準接軌的機器人通訊標準,解決國內機器人系統整合上的困擾。目前與國內多家廠商合作共同推動機器人OPC UA通訊聯盟,參與的廠商計有新代、台達、達明、新漢、上銀、勤坤,如圖5所示。

圖5 工業4.0機器手臂資訊模型聯盟組織架構
更完整的內容歡迎訂購 2020年08月號 (單篇費用:參考材化所定價)
主推方案
無限下載/年 5000元
NT$5,000元
訂閱送出