- 回首頁
- 機械工業雜誌
- 歷史雜誌
用於多移動機器人協同控制之視覺相對定位系統
作者 王俊勝
刊登日期:2020/08/01
摘要
為增加工廠自動化使用彈性,多移動機器人協同作業已成發展趨勢。提升機器人間相對定位精度是開發協同控制技術的第一步。本文闡述一套低成本且可快速實現於多移動機器人間之相對定位系統,以快速響應矩陣圖碼作為識別標誌,透過視覺感測器偵測此標誌開發高精度之定位演算法。我們設計了一測試平台以量化驗證演算法估測識別標誌之二維座標準確度與精密度。
Abstract
Multiple mobile robots working together to achieve flexible factory automation has become a future trend. Improving the relative positioning accuracy between mobile robots is the first step to develop cooperative control of multiple mobile robots. This article proposes a low-cost relative positioning system that can be quickly implemented for multiple mobile robots based on Quick Response Code (QR-Code) landmarks and a high-precision vision-based detection algorithm. We designed a test platform to quantitatively verify the accuracy and precision of the proposed algorithm to estimate 2D position from a QR-code landmark.
前言
為了提升廠區生產效率和自動化運用彈性。多移動機器人協同工作,進行搬運、加工或組裝等生產行為已成各界研發重點。相關技術包含高精度定位導航、多機器人協同控制與群組機器人路徑規劃等。而建置多移動機器人定位系統是開發多機協作技術的首要工作。
文獻上有定位需求的應用例很多,除了機器人室內定位[1-3]外,還包括三維空間地圖建立[4,5]、人體動作追縱[6]與物體姿態識別[7]等。大部分會用到的感測裝置包含慣性感測單元(IMU)[8]、光學雷達掃描儀(Lidar)[9]、無線網路(Wireless Network)[10-12]以及無線電信標(Radio Beacon)[13]等。而最常見的全球定位系統(GPS)只限於在戶外使用,且容易受到天氣變化影響,一旦進入到室內就必需加裝其他定位系統輔助,故此定位系統在移動機器人領域並不常見。常見的移動機器人定位以技術手法來劃分,大致可綜整如下三種方式:
1.三角定位法(Triangulation)
傳統的定位法,原理在於利用三個以上已知座標的地標點,分別測量待測物與地標之間的距離,每一固定距離可以畫出一個圓,其圓周上的點即為待測點的可能位置,利用三個以上有相交的圓,即可得到唯一的位置範圍,藉由以上方法,可反推待測物相對於地標的座標範圍,此方法大致又可分為量測能量大小或是時間(相位)差。這個方法的優點在於定位運作的範圍較廣,從粗定位到細定位都有可以滿足需求的解決方案;缺點則是佈建的環境成本高以及在待測物與地標點之間,容易受到遮蔽的干擾造成定位誤差。
2.同步地圖建立定位法SLAM (Simultaneous Localization And Mapping)
目前無軌式導引系統最常見的定位方法。移動機器人上需配備雷射掃描儀,在移動過程中,透過重複觀測並識別地圖特徵,用以反算並定位移動機器人的位置和姿態。再依據自身位置逐漸累進構建地圖,以達到即時座標定位和地圖輪廓構建的目的。優點在於幾乎不需要投入任何額外的地標成本,其定位精度可以達到±50 mm,缺點為雷射掃描儀價格偏高與需預留較大的安裝空間。
3.指紋定位法(Fingerprinting)
近五年研究較為熱門的定位方法。需事先建立好空間中現有的物理圖案資訊地圖(Pattern Map),例如地球磁場因為通過導磁物質(如:鋼筋水泥等)而產生的場型變化,或者是無線訊號能量分佈的狀態等等。接著再利用移動機器人上的感測器所得到的資訊與物理圖案資訊地圖進行比對,即可找到最相似點以求得待測物目前所在的位置座標。優點是佈建便宜,幾乎不需要任何額外的地標成本,且比較不會有累積誤差產生,但其缺點為定位精度較為不足,且容易受環境因素干擾。
上述移動機器人定位手法主要運用於概略範圍的定位。例如旅館送餐機器人將餐點送至點餐客人的房間。定位系統只需將機器人定位至房門口即可,定位精度在±30 cm左右都屬可接受範圍。但運用於機器人協同控制技術的定位精度就需要達到±10 mm等級,且系統只需求得移動機器人彼此間鄰近60 cm以內之相對位置資訊(車身間相對距離與車身間相對夾角)即可,在相鄰60 cm距離以上時可由概略範圍定位的方法輔助。著眼於此,本文提出一種低成本、且能快速建置於多移動機器人鄰近間之相對定位系統。以快速響應矩陣圖碼(Quick Response Code, QR-Code)當作定位識別標誌,再以視覺感測裝置偵測此標誌,透過視覺平面座標、相機座標與空間座標間的投影與幾何關係,即可求得視覺感測裝置與識別碼間相對位置資訊。之後只需在移動機器人上裝配視覺感測裝置與定位識別之QR-Code,即可以本文闡述之方法求得移動機器人間之相對定位資訊。
視覺相對定位系統
1. 快速響應矩陣圖碼偵測
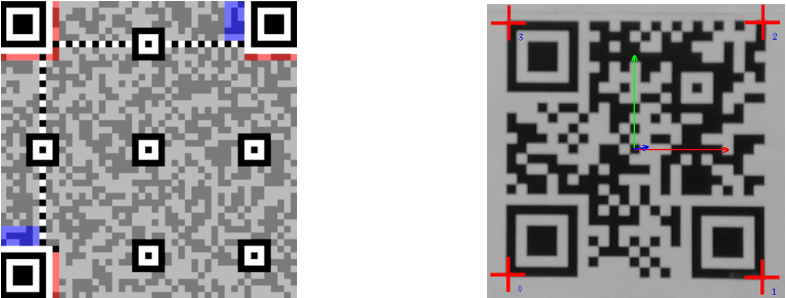
快速響應矩陣圖碼(Quick Response Code, QR-Code)是二維條碼的一種,於1994年由日本DENSO WAVE公司發明。QR-Code比一維條碼具有更快讀取和更大儲存資料量兩大優點,且成本低廉、配置簡便,故選為視覺相對定位系統之定位標誌。QR-Code為正方形,在三個邊角印有類似中文回字符號,在通用擺法下三個回字分別位於左上、右上與左下三角落,如圖1(a)所示。視覺模組即是透過偵測此三個回字符號辨識QR-Code,偵測過程若遺失其中一個回字符號即會影響辨識,而圖1(a)中其他較小回字符號為校正標誌。QR-Code一共提供40種版本儲存密度的結構,版本數值越大可儲存的資料量就越大,版本2以上才需要小回字符號進行校正識別。本文所提之視覺相對定位系統使用版本1的 QR-Code儲存之資料量已足夠。圖1(b)為偵測程序成功識別QR-Code之顯示圖。偵測的回字符號在邊角處以紅十字進行標註,同時記錄影像平面中QR-Code中心點與 此4個邊角的像素點座標值與距離值以利後續進行相對定位演算。
(a) (b)
圖1 (a)QR-Code結構圖[14]、(b)偵測程序成功識別QR-Code之顯示圖
回文章內容列表更完整的內容歡迎訂購 2020年08月號 (單篇費用:參考材化所定價)
主推方案
無限下載/年 5000元
NT$5,000元
訂閱送出