- 回首頁
- 機械工業雜誌
- 歷史雜誌
摘要
具有動力的擬人義肢手是解決上肢截肢族群痛點的主要技術趨勢,本文將概略說明肌電訊號控制的義肢手系統與介紹目前市面上的仿生電子手產品,並從各規格項目說明仿生電子手的特性和進行各產品的比較。最後,本文將從使用者角度指出目前仿生電子手未能滿足使用者需求的地方,並說明此領域技術開發的瓶頸與需要繼續投入更多研究的方向。
Abstract
Powered anthropomorphic prosthetic hand is a very promising solution to upper limb amputees’ needs. This article introduces the features of myoelectric prosthetic hand systems and products available now in the market. Benchmark of the products will be shown in the article and technical items of prosthetic hands will be discussed in details. We also reveal user requirements and insufficiencies of the present prosthetic hands. In the end, some issues in the development of prosthetic hands will be pointed out for future research directions.
前言
目前全世界大約有三百萬的上肢截肢人口,造成截肢的原因有創傷、惡性腫瘤、血管病變與感染性疾病等,而這個數字預計會在2050年達到雙倍[1] [2] [3] 。人類的手具有非常高的功能性,在生活中扮演著十分重要的角色,例如:推、拉、抓握物品、進行精細的工作、感覺環境的狀態抑或在與人溝通中用手勢進行表達等等,這些複雜的任務歸功於手部複雜的感受器構造與骨骼、關節、肌肉、肌腱構成的高自由度系統。手可以說是我們與外在環境互動很重要的媒介,所以失去了手也代表失去了很大程度的自主性並限制了工作能力、日常活動能力,進而嚴重地改變了一個人的生活,所以義肢手便成為截肢人士很關鍵的必需品。
義肢手粗略可分為被動式義肢和主動式義肢,被動式義肢又可分成裝飾用或具有功能性兩種,而主動式義肢分為自體驅動與外源驅動兩種。裝飾用的義肢俗稱假手,主要是美化缺失的肢體,提高使用者自信;被動功能性義肢是為特定活動所設計,可提供有限功能,最著名的例子便是虎克船長的鐵鉤手了。自體驅動義肢是用吊帶與拉繩固定在身體其他部位來拉動義肢進行動作,此種義肢會讓使用者非常費力,而且只能進行粗略動作的控制。近代義肢手的發展則著重在外源式的主動義肢上,透過電池驅動致動器搭配多自由度的機構設計,提供高靈活度與進行複雜動作的能力。
肌電控制義肢手系統
肌電訊號(EMG)是肌肉在收縮時會產生電位差的訊號,利用使用者自發肌電訊號控制的電子義肢手目前是解決上肢截肢者痛點最普遍應用的技術,而控制的策略則有義肢手開闔、線性控制動作速度和手勢辨識控制幾種。
肌電訊號控制義肢手開闔,原理為量測使用者餘肢兩個不同位置的肌電訊號,當肌電訊號強度超過預先設定的閥值時則分別觸動義肢手開與闔動作,此種控制策略因為較為可靠性,所以幾乎是目前市面上產品所標準配置的控制方法。線性控制則是除了閥值,還加上肌電訊號的強弱來控制義肢手開闔的速度或力道。
在控制多自由度的義肢上,利用手勢辨識有更多的可能性,而且對使用者來說也是更加直覺的控制策略。手勢辨控制原理是利用餘肢的肌電訊號會隨著不同的手部動作意圖而產生不同的肌電訊號模式,藉由分析歸類這些模式再發出不同命令去控制義肢。而肌電訊號因為耦合干擾、電磁干擾、心電訊號和重現性誤差等原本就具有雜訊多的性質,造成手勢辨識還有很多需要面對的課題。一般來說手勢辨識的流程如圖1所示,餘肢肌電訊號經由肌電感測器擷取後,經過去雜訊、放大、封包化等訊號處理方法,再從訊號中進行特徵擷取,最後使用機器學習進行手勢的辨識與分類,進而依分類結果發出命令控制義肢進行相對應的作動。

圖1 肌電訊號手勢辨識流程方法
目前外源驅動主動式義肢手系統大致如圖2所示,主要由仿生電子手、手臂套筒、微控制器、肌電訊號感測元件和電池所組成。
大部分使用的肌電感測元件是表面肌電訊號電偶極,在此簡稱為肌電貼片,這種貼片是非侵入式的,放在使用者餘肢的皮膚表面上,但缺點就是雜訊多、不穩定、時常量測到多條肌肉的訊號組合,汗水也會影響到訊號的表現,此種貼片仰賴與皮膚的良好接觸與位置的準確度。
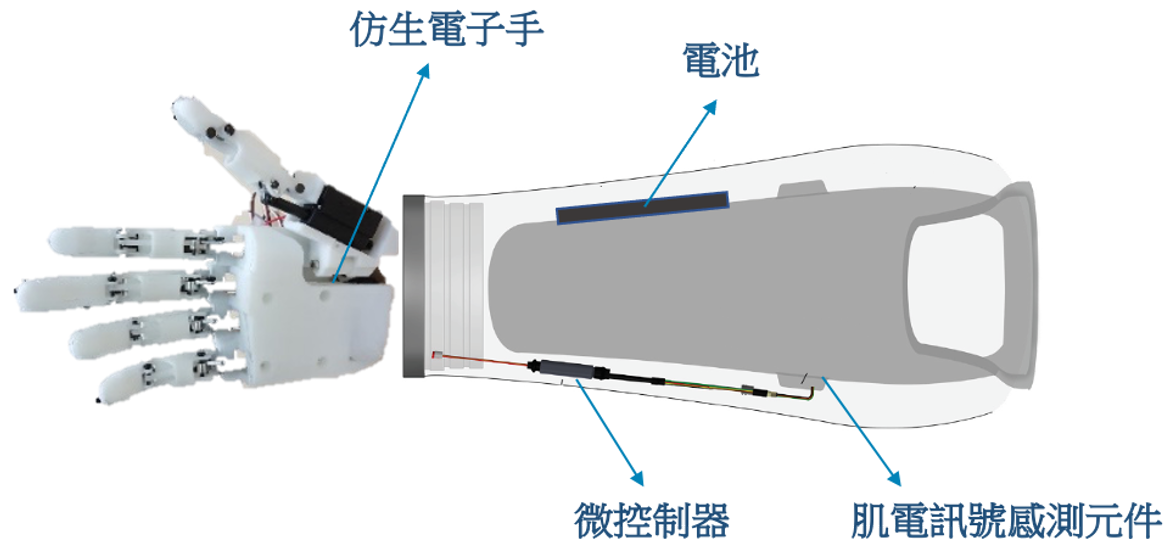
圖2 外源驅動主動式義肢手組成部件
為了達到良好的手勢辨識效果,亦有一些植入式的肌電感測元件正在進行早期的研究,植入式的優點在於能得到更穩定且雜訊少的肌電訊號,而且減少因為擷取位置的偏移所產生的訊號誤差,而缺點就是需要進行侵入式手術,而且感測器無法在體內置放太久,市售產品還是以肌電貼片為主。在手勢辨識中需要使用的肌電貼片數量並沒有明確的標準,根據想辨識的手勢數量與準確度,在應用與研究中所使用的貼片數量由4片到16片都有,然而研究顯示6到8片可辨識10種不同動作,4片可辨識6個基本的手勢[4] 。有些進階的肌電義肢具有抓取力道的感測回饋,利用壓力感應器或其他形式的觸覺感測模組,達到調整抓握力道和防止物品滑落或是提供觸覺回饋給使用者。
回文章內容列表更完整的內容歡迎訂購 2020年08月號 (單篇費用:參考材化所定價)
主推方案
無限下載/年 5000元
NT$5,000元
訂閱送出