- 回首頁
- 機械工業雜誌
- 歷史雜誌
工業基礎專欄|基於AUTOSAR協定之軟體底層架構介紹
作者 宋柏麟、陳人豪
刊登日期:2020/10/01
前言
AUTOSAR最初在2003年由AUTOSAR聯盟提出,主要的目的為在汽車電子控制裝置上建立一個開放且具有標準化的軟體架構。AUTOSAR在車用電子的軟體設計上提供了一個統一的架構,將軟硬體的接口介面定義標準化,自此軟體設計不再被整車廠綁定,整車廠也可以相對節省軟/硬體的開發費用,可以說改變了整個車用電子開發生態系,創造了一個新興的產業-車用電子軟體開發商。
AUTOSAR將軟體分成三個階層,分別為應用層(Application layer)、執行環境層(Runtime Environment, RTE)與基礎軟體層(Basic Software layer, BSW),本文主要著重在基礎軟體層(Basic Software layer, BSW)的介紹。
基礎軟體層架構
基礎軟體層(Basic Software layer, 以下簡稱BSW)為在AUTOSAR軟體架構下,軟體與硬體最初的抽象化界面,其中依據執行功能又分成四大類,包含服務層(Service Layer)、複雜驅動層(Complex Driver)、ECU抽象層(ECU Abstraction Layer)以及微處理器抽象層(Microcontroller Abstraction Layer, mcal),如圖 1所示。
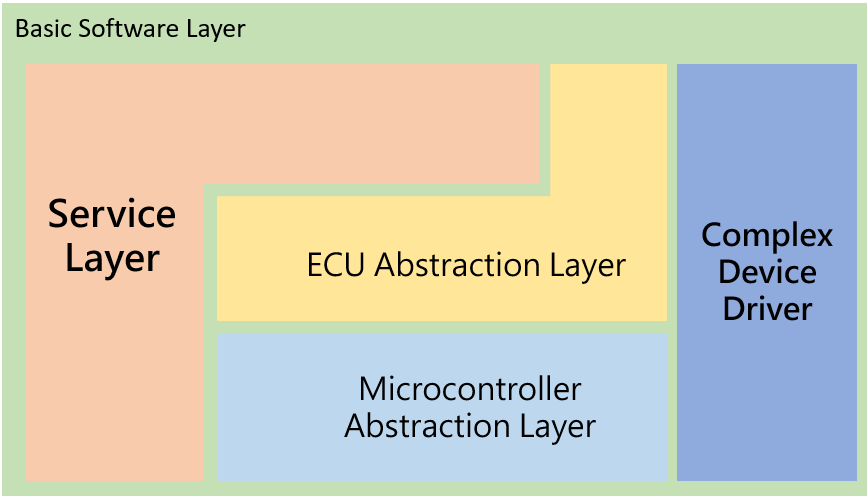
圖 1 AUTOSAR BSW執行功能分類
服務層(Service Layer)主要功能為提供整個處理器系統驅動的作業系統、狀態管理、記憶體管理以及診斷等非應用相關的服務。這些服務連接著整個處理器運作系統,並提供給應用層使用。複雜驅動模組(Complex Driver)主要是為了提供各個晶片特殊的周邊驅動所定義的模組
更完整的內容歡迎訂購 2020年10月號 (單篇費用:參考材化所定價)
主推方案
無限下載/年 5000元
NT$5,000元
訂閱送出