- 回首頁
- 機械工業雜誌
- 歷史雜誌
|工業基礎專欄|工具機空間精度量測與補償技術探討
作者 吳相儒
刊登日期:2019/12/01
前言
近年來航太及汽車產業需求日漸增長,在盡量不增加機械成本以及長時間維持加工品質的需求下,工具機精度量測及補償技術被視為是解決此問題的重要方法之一。即使在全球智慧機械迅速發展的今日,根本的機械幾何精度仍舊是重要的一環,本篇研究內容將介紹,利用空間精度量測技術來探討五軸工具機的幾何誤差,企圖找出關鍵因素,並利用此技術做適當補償以改善工具機幾何誤差與空間精度誤差表現。
從線性軸幾何誤差到空間精度
工具機所有誤差來源中靜態誤差佔了70%,而幾何誤差為靜態誤差中的主要成分,其可分為元件誤差(Component error)以及位置誤差(Location error),元件誤差係指誤差隨元件移動位置不同而有不同的誤差值,可視為一誤差函數對應不同位置,例如 : 定位精度、真直度、PITCH、ROLL、YAW。位置誤差則不隨移動而改變,是一固數值,例如 : 垂直度、旋轉中心誤差…等。
五軸工具機一般含有三個線性軸以及兩個旋轉軸(包含一旋轉軸、一傾斜軸),在線性軸部分中,由三個線性軸所組成的座標系統中,含有三個因垂直度造成的位置誤差,以及每一線性軸中共含有6個自由度元件誤差,故在三個線性軸所組成的座標系統中,共含有二十一項誤差,而一旋轉軸中共有5個位置誤差以及6個自由度元件(定位精度、兩方向真直度、PITCH、ROLL、YAW)誤差共11項誤差,因此五軸工具機一共含有線性軸21項誤差加上兩個旋轉軸22項誤差,共有43個誤差項。
空間精度誤差來源中,除原有的零組件品質及加工組裝技術所造成的定位精度與真直度外,運動角度是一大關鍵(PITCH、ROLL、YAW),由圖1可知,當運動過程中產生角度誤差時,會使得定位精度在不同Z位置造成影響,此影響因子也會同時影響在真直度誤差裡。
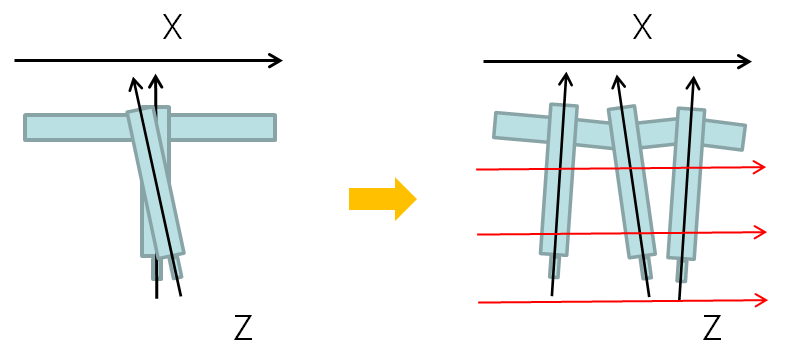
圖1 運動角度誤差與不同位置定位精度之關係
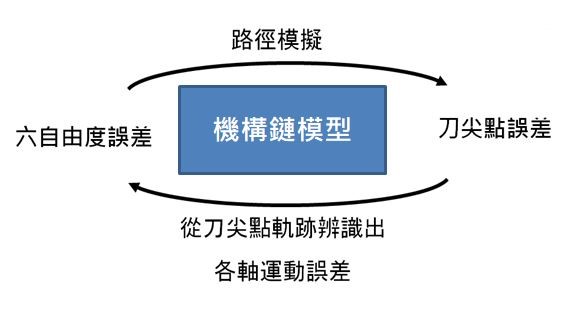
然而上述的運動角度關係又會被不同線性軸堆疊的關係所影響,因此必須針對機台構型建立機構鏈,以掌握刀尖與工件的相對位置,使得線性軸與旋轉軸的堆疊關係能完整建立在控制器內,使其運算及補償機制能夠正常運作。其簡單概念是由刀端點出發經過各驅動軸後至工件座標原點而形成一個封閉架構。
故如能將各線性軸之6自由度誤差量測出來,再將按照其構型建立相對應之誤差模型,即可計算出空間各位置之刀尖點誤差。如圖2所示
更完整的內容歡迎訂購 2019年12月號 (單篇費用:參考材化所定價)
主推方案
無限下載/年 5000元
NT$5,000元
訂閱送出