- 回首頁
- 機械工業雜誌
- 歷史雜誌
摘要
本文研究工研院智慧機上盒於工業馬達之監控技術開發,試圖在馬達運轉狀態下進行馬達磁鐵磁通、轉子角度、轉動速度與輸出力矩(Flux, Angle, Speed and Torque, FAST)之即時監控。本文提出之FAST線上即時估測技術可以準確評估馬達即時運作情形,並在估測值異常時提供馬達故障停機警示。此外在馬達故障停機後,本文更進一步開發可於停機後對靜止馬達進行之故障診斷技術,利用注入高頻訊號並量測其電氣訊號回授能夠提供更準確的馬達故障型式並判斷目前馬達故障嚴重程度。最後以特別訂製之故障馬達進行故障診斷演算法進行評估 ,證實本文提出之在線監控與離線診斷演算法能準確監控馬達運作狀況並在故障後有效評估故障情形。
Abstract
This paper disscusses the development of an online diagnosis method for industrial permanent magnet (PM) motors. The proposed motor monitoring scheme is based on the estimation of flux(F), angle(A), speed(S) and torque(F), aka FAST. The FAST estimation is applied for the motor condition monitoring to provide fault alarm once motor fault occurs. If the fault signal is detected, the motor diagnosis is performed by injecting a high frequency signal at standstill. In addition, fault type can be identified based on high frequency current response. Feasibility of the proposed algorithm has been evaluated and verified on a custom faulty motor.
前言
二十一世紀以來,科技進步,從以前的土法煉鋼、蒸氣技術、電力的大規模應用,一直到現在的工業自動化時代,許許多多的工具機、機器人,都需要共同的核心來達成,那就是馬達,而永磁同步馬達(Permanent Magnet Synchronous Motor , PMSM)更是受到許多學界跟業界的注目眼光,因為它有著體積小、高效率、高功率密度的優點[1],比起有刷直流馬達,它更不用做定期維修碳刷的工作,變速範圍也比較廣。
雖然永磁同步馬達相較於傳統有刷直流馬達可靠性已有很大的提升,仍有許多故障可能會在馬達系統運轉時發生,對於許多講求高可靠度的應用如:性命攸關之車用系統、維修不易之再生能源系統以及停機會造成巨大財務損失之工廠自動化生產系統而言是無法被接受的。因此未來趨勢會朝向馬達運作中之線上診斷技術發展,其相較於傳統馬達診斷方式具有(1)不需拆卸馬達、(2)可在故障發生後第一時間進行相應處置以及(3)可評估馬達驅動系統維護時程之優點。馬達線上診斷與即時監控技術需要反電動勢轉子位置(angle)估測、馬達速度(speed)估測、磁通(flux)估測及力矩(torque)估測四種關鍵估測技術。
外接式馬達驅動監控技術也是另外一種近年來備受矚目的關鍵技術,一般如果得知馬達目前運作情形,往往會需要預安裝各種感測器,如轉角感測器、加速規與力矩感測器來獲取相對應的資訊,但某些感測器價格過於昂貴,且其配線以及安裝環境限制會影響上述感測器的應用場域,甚至可能會因高壓馬達驅動系統之隔離問題,導致監控系統引入數百伏特以上的高壓而燒毀,若能透過完善隔離的外接式電流與電壓感測器便能透過各種估測數學方法達到與感測器直接量測相似之即時監控效果,便具有相當的商業與工程價值。
本文主要目標為研究反電動勢轉子位置、馬達速度、磁通與力矩之估測方法,並將其運用至:A. 實現馬達線上即時FAST四項關鍵參數監控;B. 馬達線上故障偵測警示與馬達靜止高頻注入故障診斷技術
FAST估測方法
圖1(a)為外接式FAST估測演算法的估測訊號流程圖,FAST估測法首先從永磁馬達的PWM電壓與三相電流訊號中汲取出馬達運轉的反電動勢電壓,利用估測所得的反電動勢電壓進行馬達轉子角度估測,接著再利用估測所得到的角度進行馬達永磁磁通估測,最後透過估測所得的馬達磁通經由演算法得到馬達即時力矩輸出,達到馬達四大關鍵參數FAST之完整估測。圖1(b)是利用馬達反電動勢電壓進行角度與速度估測的方塊圖,藉由已知的馬達電氣參數電阻與電感,可以由馬達的反電動勢得到目前馬達運轉的即時速度與角度。
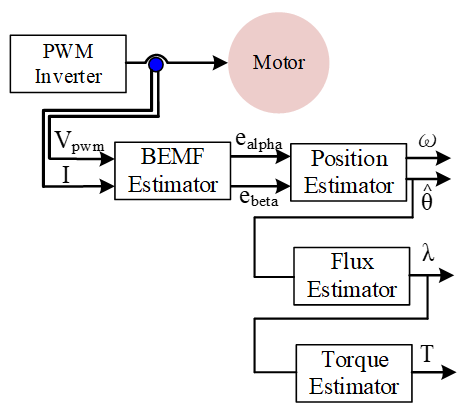
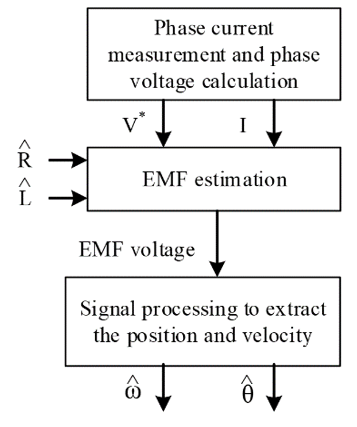
(a) (b)
圖1 FAST估測演算法流程圖 (a)FAST訊號流程圖 (b)反電動勢角度與速度估測流程圖
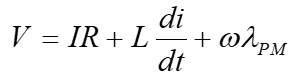
FAST演算法最重要的核心部分是反電動勢估測部分,反電動勢估測方法可從由永磁同步馬達電壓的等效電氣通式推導得到,如式(1):
 (1)
(1)
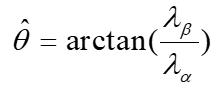
其中V為馬達電壓,R為馬達電阻,L為馬達電感,ω為馬達轉子轉速,為馬達轉子磁通。利用(1)式可以得到馬達當下的反電動勢資訊,可再進一步得到馬達角度(Angle),如式(2):
 (2)
(2)
其中和是α軸與β軸的磁通,是估測所得到的馬達轉子角度;接下來利用位置訊號得到馬達速度(Speed),再透過反電動勢積分可得到馬達磁通(Flux),最後經由估測磁通與量測電流得到馬達力矩(Torque),如式(3):
回文章內容列表更完整的內容歡迎訂購 2021年05月號 (單篇費用:參考材化所定價)