- 回首頁
- 機械工業雜誌
- 歷史雜誌
摘要:機械手臂在自動化的領域應用非常多,常見用於取放、輸送、組裝、檢測以及加工等應用上。近年來,由於缺工與數位轉型等因素影響,工業自動化的程度也越來越高,因此機械手臂用於加工應用上的需求也越來越高。傳統上機械手臂強調高速高精準度,但對於複雜且細膩的加工作業如切割、焊接、研拋等應用,由於來料的公差變化,則需要額外的力量感測回授控制確保加工品質。因此力量感測相關的技術與產品也蓬勃發展中,本文將介紹目前機械手臂力量感測相關的應用技術,以及其應用的場合。
Abstract:Robot manipulator is widely used in the field of automation and is commonly used in picking, conveying, assembling, detecting and machining applications. In recent years, due to labor shortages and digital transformation, the degree of industrial automation has also increased. Traditionally, robotic manipulator emphasize high speed and high precision, but for complex and delicate processing operations such as cutting, welding, grinding and polishing, etc. Due to the tolerance of incoming materials, additional force sensing feedback control is required for quality. Therefore, force sensing technology and products are booming. This article will introduce the current application technologies related to force sensing of robotic manipulator as well as their application occasions.
關鍵詞:力量感測、機器人、自動化應用
Keywords:Force sensing, Robot, Automation application
前言
機械手臂在自動化加工應用,多使用路徑生成軟體來進行軌跡規劃,由於模擬軟體所生成之路徑是依據虛擬3D工件及機器人系統Layout生成。在實際應用中,工件的尺寸變異及機器人系統Layout誤差,導致機器人作業上需要進行補償。補償的方式有許多種方法,其中1種便是透過力量回饋。此方式常見於機器人研磨及拋光作業,透過力量感測方式,將精細變化轉換成力量訊號,並經由分析校正,則可以將機器人加工精度進一步提升,達到更好的加工品質。
在無力量感測的狀況運行下,機器人是無法得知外在環境變化,面對複雜的環境無法即時地做出反應,傳統機器人作業都以安全框架將做動區域框住,以確保無人或外在物的闖入造成工安問題。但由於自動化的應用越來越高階繁複,更多的人機協作與多機共工等應用需求,因而針對機器人本體的力量感測安全防護,也是機器人力感測技術的重要一環。由於人機或多機在工作時安全區域的重疊,除了預先規劃的障礙迴避外,對於經常需動作重疊的作業情況,機器人本體或近接區域的力量感測就必須考量,透過力量感測的防護,可降低與迴避不必要的傷害。
機器人力量感測技術
機器人力量感測的技術主要分成以下兩類:
1.馬達回授力感測訊號
2.外部額外力感測器裝置訊號
第1種類型是透過機器人本體的各軸馬達回授扭力訊號,再經由機器人慣性轉換推算出末端介面的受力情形,如圖1所示。其優點是不需要額外加裝力量感測器,且同時能搭配控制訊號進行更精細的控制,然缺點也因訊號由各軸回授,力量經過連桿傳遞後已經有大部分的削減,並且控制本身須將機器人本體自身重量納入計算中,因此在控制器設計上需要搭配更多濾波與進階方法;第2種則是將高敏度的力量感測器裝置在機器人末端上,如圖2所示。其優點是末端力量的反應較為敏銳,但缺點也由於力量感測器加裝在手臂末端,會降低手臂的荷重能力。當運用於高速或加工作業時(如鑽孔或切銷),為了確保作業品質,手臂的有效荷重能力可能會降低至三分之一,此時再加裝力量感測器(包含相關的鎖固零件),會再進一步削弱手臂的有效荷重能力。除此之外,力量感測器的成本也是很大的考量因素,但此方法可以直覺性的透過力量感測器讀取數值,且較為準確,加上與控制器整合也較為容易,所以目前以加裝力量感測裝置的應用較為常見。
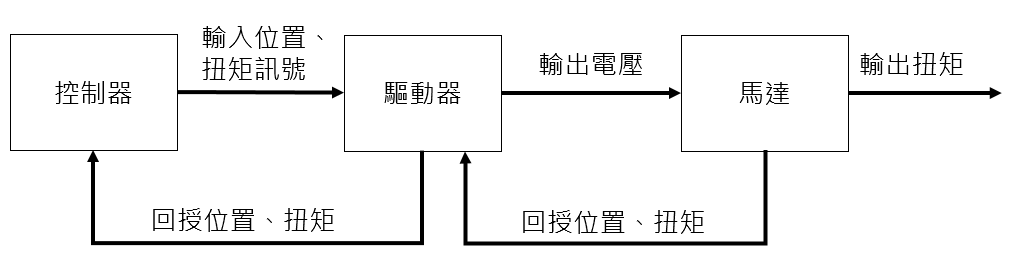
圖1 馬達力回授控制
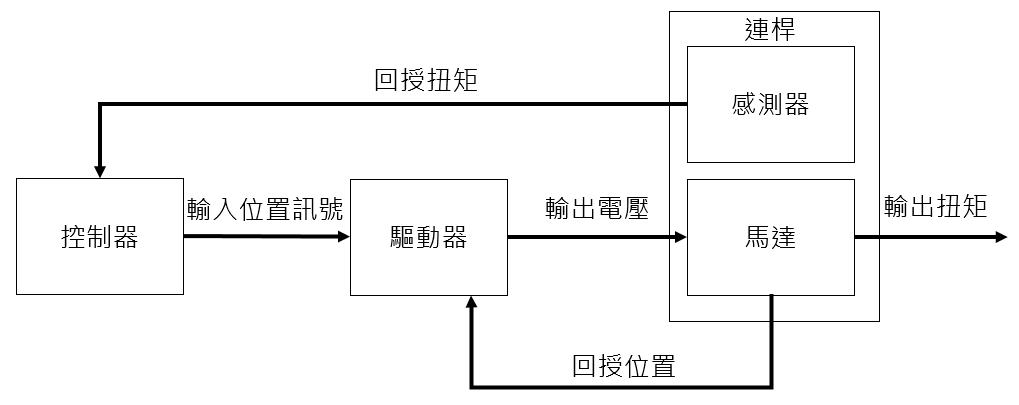
圖2 外部額外感測器力回授控制
透過馬達的負載力回授來進行各軸控制,實務上需設計許多濾波器來濾除不必要的雜訊,控制迴路實作上也有多種不同方式,如圖1型式之力回授控制為全閉迴路控制,其閉迴路全交由控制器來計算,透過驅動器取得馬達之編碼器位置以及扭矩,並回授給控制器系統,由控制器計算出運動控制的位置與扭矩訊號,進而給驅動器執行輸出電壓給馬達,或是雙閉迴路控制,由驅動器以及控制器來各自負擔計算,位置閉迴路由驅動器負責控制,而控制器取得馬達的扭矩訊號後進行扭矩閉迴路控制的雙迴路控制系統等方式,這種控制方式常用於協作機器人拖拉教導技術等。
透過外部額外感測器來進行力回授控制,實務上控制濾波器設計要求較低,而與感測器的通訊速度頻寬要求較高,控制迴路的實作上採半閉迴路控制加上感測器回授補償,其由驅動器控制馬達的位置定位,再透過感測器回授的扭力訊號進行位置控制的訊號補償,由控制器計算末端感測器受力與馬達輸出位置的關係,進而達到力量回授控制目的,而這種控制方式常用於機器人加工的恆定力控制系統或是機器人安全防護系統等。
更完整的內容歡迎訂購 2022年08月號 (單篇費用:參考材化所定價)
主推方案
無限下載/年 5000元
NT$5,000元
訂閱送出