- 回首頁
- 機械工業雜誌
- 歷史雜誌
摘要
工廠大量使用機械手臂來加工生產已是近年來的發展趨勢,雖然市售主流的機械手臂可搭配對應的離線編程模擬軟體來產生加工路徑,但需具備精準的設備定位與工具校正精度之前提,才能達成自動化加工生產的功效,這對於生產少量多樣產品的工廠來說是非常大的挑戰,因此大部分的產線仍以教點的方式產生加工路徑。教點式加工路徑最大的缺點是撞機即失效,因此本文介紹一種透過十字雷射感測器修正撞機路徑的方法,達成產線快速復原生產的功效。
Abstract
Adopting robot arms for manufacturing process in factories has become an inevitable trend for years. Several commercial off-line programming simulating software can be applied for generating motion trajectory for robot arms. However, it requires accurate device positioning and tool calibration in order to achieve the effect of automatic manufacturing. It is very challenging for factories to produce small quantity products with various customization requirements. Therefore, the trajectory generation highly depends on manual teaching via teaching pad. Using this method to generate path would fail if collision happens. Thus, we introduce a method in this paper to modify paths after collision by using cross laser sensors, which can achieve the effect of quickly resuming the production process.
前言
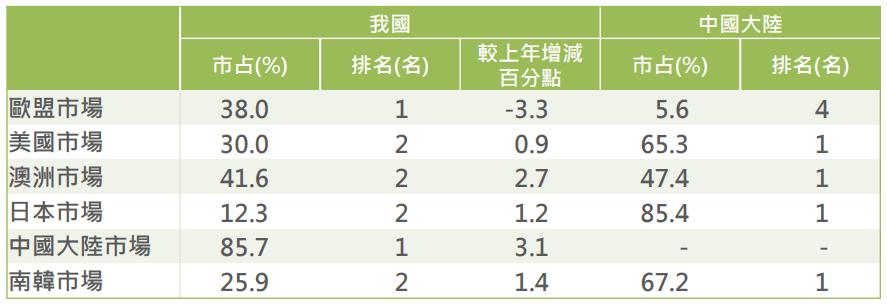
隨著產品精緻化與消費型態的改變,少量多樣與客製化的產品逐漸成為市場主流,並伴隨勞力成本上漲使工廠不易招募人力,因此導入機械手臂進入工廠一直以來都是發展的趨勢。根據國際機器人聯盟(IFR)的報告指出,從2017年到2020年全球工業機械手臂的裝置量每年都至少37萬台,其對應的市場規模每年都至少100億美元[1]。在2019年的資料顯示工業機械手臂在各領域應用的比例以汽車產業(28%)、電機電子產業(24%)以及金屬產業(12%)為大宗,佔的比例超過六成[2],這些產業大量導入機械手臂的原因除了產品獲益高之外,還有一個原因是生產過程大多屬於3K(骯髒、危險、辛苦)工作,所以也不適合人類長時間參與。機械手臂在產線的應用範疇已從過去簡單的夾取、上下料等動作,擴展到鑽孔、切割、研磨、拋光、噴塗、焊接等複雜的加工動作,根據2019年IFR的報告指出,扣除夾取、上下料與一些特殊的其他應用,以焊接應用為最大宗[3],以台灣自行車產業為例,其出口額從2003年的2.6億美元增加至2018年的6億美元,平均單價從2010年的134.5美元提升至2018年的539.6美元[4],代表自行車產業往高附加價值發展,且在2018年我國自行車在歐盟、中國市占率排名第1,在美、日、韓、澳市占率排名第2,詳細數據由表1所示[5],所以在生產過程必經的焊接製程就會導入大量的機械手臂參與生產。
表1 2018年我國自行車在各國進口市場之市占率
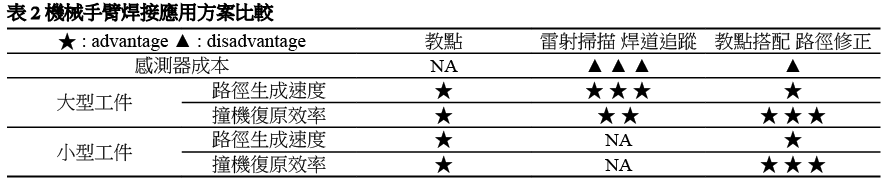
因此近年隨著自行車零組件外銷量的遽增,對於大量機械手臂導入的焊接製程,我們就必須思考如何提高生產效率,常見的做法是在機械手臂末端結合焊槍裝上一個雷射掃描感測器用來自動追蹤焊道產生焊接路徑,但這種做法對於自行車零組件來說,會受到小型管件曲率大與模具固定方式等因素影響雷射掃描效果,因此大部分的自行車零組件生產業者,仍是透過教點的方式來產生焊接路徑。在機械手臂焊接的過程中,焊槍上的焊條可能因操作不甚撞歪,或是使用久了需更換新的焊條,任何與教點時焊條位置不同的情況發生,都會讓先前辛苦教出來的焊接路徑完全失效,需再根據新裝上的焊條重新教點,非常耗時且會讓產線停擺太久而影響生產效率。因此本文介紹一種透過十字雷射感測器快速復原焊接路徑的方法,可以大幅縮減產線停擺的時間。上述對於機械手臂焊接應用方案的優劣比較整理如表2所示,接下來的章節會先介紹市面上的十字雷射感測器種類,再來介紹工研院結合機械手臂與十字雷射感測器開發的加工路徑修正技術。
十字雷射感測器介紹
對於機械手臂焊接應用而言,十字雷射感測器常用來校正焊槍末端焊條的TCP座標,其中TCP是工具中心點Tool Center Point的縮寫,以下會針對市面上可以購買到的十字雷射感測器來做介紹。
1. LEONI [6]
此公司出售的十字雷射感測器有三種感應尺寸,分別是120mm x 120mm與240mm x 240mm的方形兩種,還有直徑300mm的圓形一種,如圖1所示。此公司不只出售硬體,也出售完整的工具校正方案,包括3D、5D與6D的TCP校正功能,其支援的機械手臂廠牌包含FANUC、YASKAWA、ABB、KUKA等。

圖1 LEONI十字雷射感測器
2. CAPTRON [7]
此公司出售的十字雷射感測器大大小小有非常多種,這邊依小中大三種感應尺寸各介紹一種產品,分別是直徑40mm、88mm與210mm的圓形三種[8],如圖2依序由左至右所示。YASKAWA德國分公司有整合CAPTRON十字雷射感測器,推出一套QSet TCP的工具校正方案[9],如圖3所示。

圖2 CAPTRON十字雷射感測器
圖3 YASKAWA QSet TCP工具校正方案
更完整的內容歡迎訂購 2021年08月號 (單篇費用:參考材化所定價)
主推方案
無限下載/年 5000元
NT$5,000元
訂閱送出