- 回首頁
- 機械工業雜誌
- 歷史雜誌
摘要:關節式機器手臂的工作空間範圍大,易受到自身重量與負載導致慣量變化造成共振頻率飄移,然而目前主要控制的方法乃是透過調整伺服驅動器內部的凹陷濾波器來達到振動抑制的效果,但凹陷濾波器的參數必須對機器人進行系統鑑別後才能獲得最佳化的參數,當共振頻率飄移時,凹陷濾波器參數無法即時調整則減振效果大幅下降。本文提出一套適應性命令整形技術,能線上偵測共振頻率之飄移,並隨著頻率飄移,將整形器參數進行適應性調整,以保持振動抑制效果在最佳狀態,此適應性命令整形技術能提供平滑之參數調校,並不會在參數切換時造成不連續現象,因此相當適合用於慣量急劇變化或載重變化極大之機器手臂。
Abstract:The task space of an industrial robot is large, and it is susceptible to the change of inertia that caused by its own weight and load, which leads to the drift of resonance frequency. Currently, the main control method is to adjust the notch filter of the servo driver to suppress vibration, but the optimal parameters of the notch filter can only be obtained after the system identification of the robot. When the resonant frequency is drifted, the notch filter parameters cannot be adjusted immediately and the vibration suppression effect will be extremely reduced. Therefore, this study proposes an adaptive input shaping technology, which is capable to detect the drift of the resonant frequency online, and adjusts the parameters of the shaper smoothly with the frequency drift to maintain the vibration suppression effect. The proposed method ensures the continuity and correctness of the path when switching parameters. Therefore, it is suitable for industrial robots with extremely large changes in inertia and load.
關鍵詞:共振頻率、振動抑制、適應性命令整形
Keywords:Resonant frequency, Vibration suppression, Adaptive input shaping
前言
2019年12月爆發嚴重特殊傳染性肺炎(COVID-19),各國開始封城、管制及停工等,導致製造業供應斷鏈,關鍵零組件無法順利生產製造,此狀況凸顯全球供應鏈的脆弱,先進國家基於經濟及國家安全為由,提倡製造業回流、在地化生產,在國內建構自主的供應鏈。在台灣,COVID-19也導致全國在2021年5月進入三級警戒,對國內外製造業衝擊甚鉅,迫使產業深切體認到維持生產產量以及降低人力的必要,且開始正視自動化的重要性,並開始進行產業轉型與數位化,藉此導入更多工業機器人提高生產製造力。
工業機器手臂常見的應用產業如半導體、車用、航太等,手臂能應付高重複性任務、加速生產、降低成本、提升品質及保護工人的安全。然而機器手臂為多連桿結構,且手臂各關節軸乃是撓性結構,剛性相對較低,當高速移動或插補器設計不良時,容易導致手臂振動,通常振動現象的解決方式為降低伺服迴路參數,但降低伺服參數會造成手臂性能與軌跡精度不佳,機器手臂另外一個嚴重的問題是振動頻率會因為載重或工作空間位置不同時使得共振頻率飄移,如何有效解決此問題將是本文探討重點。本文相關結果已發表於2021中國機械工程學會第38屆全國學術研討會,題目為「應用適應性命令整形技術於機器手臂振動抑制之研究」[1]。
適應性命令整形技術
除了調整伺服與插補參數外,抑制振動方式之一為輸入整形法,此技術是將原始(未整形)之系統輸入與一組脈衝訊號進行卷積(Convolution),以產生一組新的命令系統,此脈衝訊號的時間和振幅是根據系統的自然頻率和阻尼比進行設計,經由Convolution後的訊號通常會將命令中引發共振的頻率濾除[2][3]。Shan [4]提出一方法名為修改原始的命令整形器Modified input shaping zero vibration(MISZV),發展出可控制命令整形器的參數數量與激發時間。除此之外,Singhose [5]說明輸入整形技術所耗費的時間比起具有類似振動抑制能力的數位低通濾波器(Low pass filter)或凹陷波濾波器(Notched filter)來得更短,而耗費時間越短,系統響應速度可以越快,從而提供機器手臂更高速的反應能力、穩定度、加工品質與生產力。
由於機器手臂的自然頻率和阻尼會隨著工作空間位置而改變,對於此種可變結構(具慣量或剛性改變之受控系統)或時變系統(Time varying system),離線(Off-line)時是可通過數值模擬和迭代程序進行離線規劃[6],但在線(On-line)時是可應用時變輸入整型技術 (Time-Varying Input Shaping Technology, TVIST)。TVIST是具有時變動態系統開發的,可分為連續時間的和離散時間的TVIST方法,分別簡稱CT-TVIST與DT-TVIST。CT-TVIST具有良好的振動抑制功能,但在實際應用中缺乏彈性,以機器手臂為例,必須提前知道移動軌跡的數學式描述,已被證明在2DOF機械手臂[7],甚至在6DOF工業機器人與機械系統時可以以較簡單的動力學方程獲得[8]。同樣地,DT-TVIST也被證明其振動抑制的有效性[7],DT-TVIST比CT-TVIST更能實現更多自由度之軌跡生成,但是DT-TVIST會引入數值噪聲(Numerical noise),在系統中會引入額外振動。
由於機器手臂為變結構系統,振動頻率會隨著手臂空間位置不同而改變,傳統輸入整形技術只能針對固定的振動頻率進行抑制,在機器手臂應用上會有瓶頸且效能不佳,因此本文將採用Shan[4]所提出之MISZV方法加以延伸應用,發展出當機器手臂振動頻率飄移時還能保有輸入整形器效果的系統。
1. 概念說明
輸入整形技術概念是有一脈衝訊號輸入於系統中,由於系統本身有一自然頻率因此會造成系統震盪,理想情況下,如果能在合適的時間設計出合適的脈衝,第一次脈衝所引發之震盪將可被所設計出的第二次脈衝完全抵消,系統將可以表現出零震盪。圖1顯示當A1在t1=0輸入給系統後產生振盪,若能計算出t2=0.5時間設計出反向脈衝訊號即可有效抵銷振盪,使後續振盪總和更小或接近於0,即是輸入整形的基本概念。
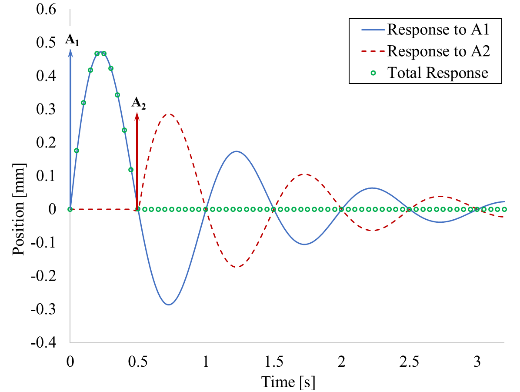
圖1 兩脈衝訊號自消除示意圖
2. 適應性整形器
將系統以標準二階系統表示,系統中包含ωn為自然頻率、ζ為阻尼比,二階系統轉移函數表示如下
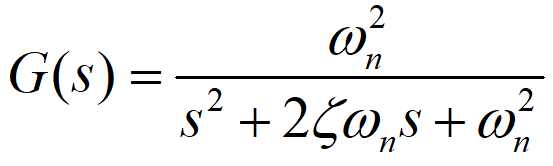 (1)
(1)
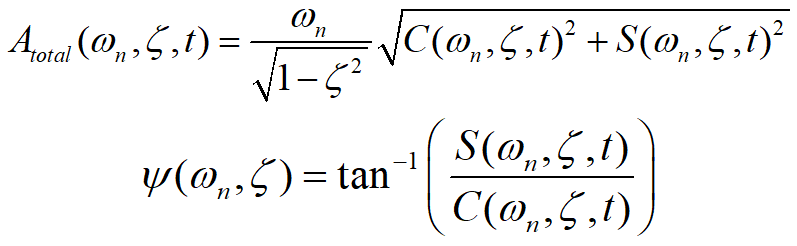
系統中的自然阻尼頻率ωd與週期Td分別可以表示與Td=2π/ωd,振動系統在多個脈衝下,輸出響應透過疊加可以表示成以下
 (2)
(2)
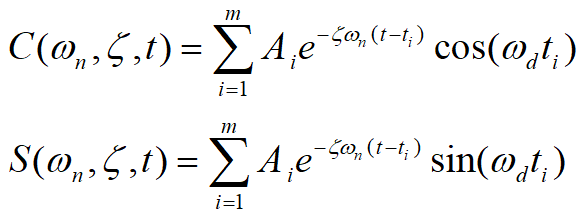
其中
 (3) (4)
(3) (4)
其中
 (5)
(5)
更完整的內容歡迎訂購 2022年03月號 (單篇費用:參考材化所定價)
主推方案
無限下載/年 5000元
NT$5,000元
訂閱送出