- 回首頁
- 機械工業雜誌
- 歷史雜誌
摘要:工業設備像是電腦數值控制工具機、機械手臂等,於應用前都需要經過校正來達到最佳的應用效果。這些校正包含原點校正、工具座標校正、工作平面校正等等。目前對這些校正作業都是由人力來進行操作與教導。本文工業設備以機械手臂為例,探討如何使用視覺系統對工業設備進行自動工作平面校正與一種創新的工作平面校正裝置。
Abstract:Industrial equipment, such as computer numerical control machine tools, robotic arms, etc., need to be calibrated before application to achieve the best application effect. These corrections include origin correction, tool coordinate correction, work plane correction, etc. Currently, most of these calibrations are conducted manually. In this article, the robotic arm is taken as an example for industrial equipment to discuss how to use the vision system as an innovative work plane calibration device to perform automatic work plane correction for industrial equipment.
關鍵詞:工業機器人、工作平面校正、視覺系統
Keywords:Industrial robot, Work plane Calibration, Vision system
前言
工業設備中的工具機與機械手臂已大量的應用在大大小小的加工廠中,其中工具機有機械之母之稱,為切削、磨削金屬加工,製成加工者所需形狀、尺寸的機械,一般又俗稱為工作母機。而機械手臂因各軸之間為串聯式的特性,能夠達到高空間自由度的彈性應用,近年來以大量的應用在產線或是搭配工具機進行上下料、輕加工的相關應用。無論是工具機還是機械手臂,都會因為製造、組裝、控制、環境等因素而影響其應用精準度,所以在其被應用前都需要經過校正的步驟,使其回到原先設計的功能與精度。設備上有許許多多的校正,如原點校正、工具座標校正及工件座標校正等等。目前這些設備上的校正主要都是依靠人工的方式進行校正。本篇文章的重點在講述以視覺系統自動進行工作平面的校正方法跟以視覺系統建立一種創新的工作平面校正裝置。工業設備以有較高空間自由度的六軸機械手臂為例,使用視覺系統進行工作平面的自動校正。
視覺用於工業設備之工作平面校正裝置與校正方法
本文分為兩個部分,第一部分為工作平面校正方法說明,第二部分為開發一種創新的工作平面校正裝置說明。
1.工作平面校正方法
六軸機械手臂有六個空間自由度,除了可以往XYZ方向移動,還可以繞著XYZ軸旋轉,所以要將教導六軸機械手臂的姿態使其法蘭面或是末端夾具跟工作平面平行,進行最常見的上下料應用時,需要操作人員有一定的經驗才能完成。因此發展出了利用視覺系統來進行工作平面的自動校正方法。
我們以視覺系統來完成工作平面的校正,分成三個部份:(1)手眼校正(Hand eye calibration)[1];(2)工作平面校正自動校正方法;(3)工作平面自動校正實驗結果。
(1)手眼校正
如圖1關係圖,本篇是利用AX=XB的方法來進行手眼校正的方法。我們需要的最終結果,即得到cam與 tool 的空間位置關係,即一個4*4的變換矩陣。這個可以每次移動tool即相機在不同位置角度多次拍攝標定板來計算得到。
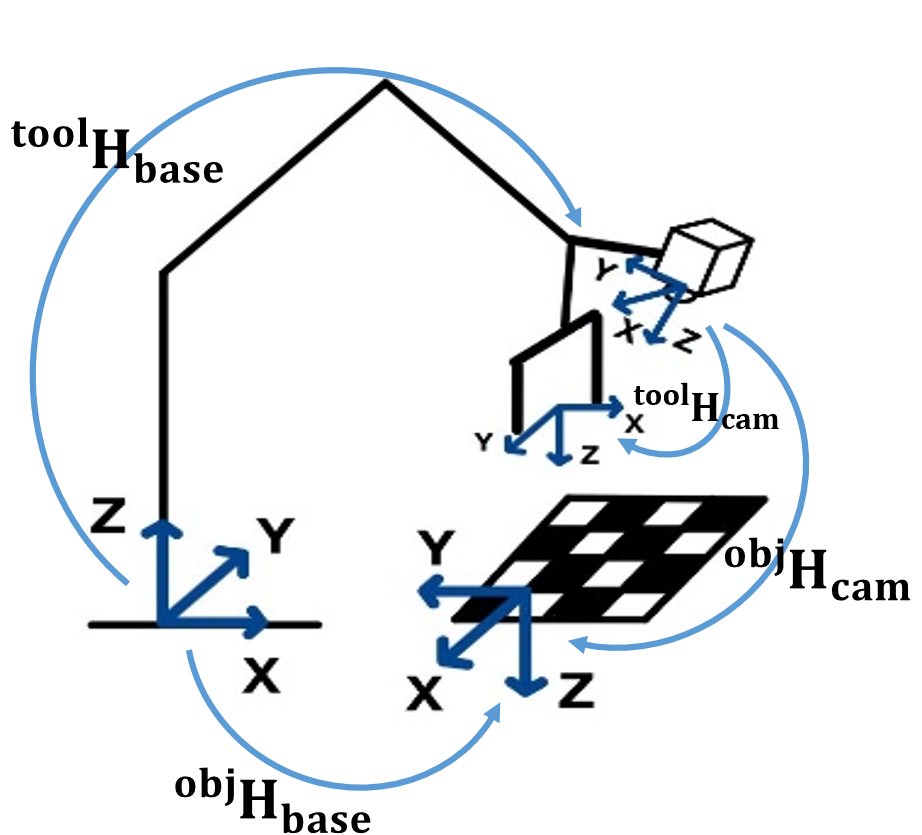
圖 1 手眼校正之座標關係圖
 (1)
(1)
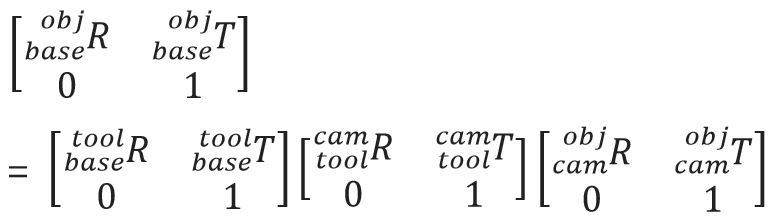
設定位置後,工件座標系相對於基座標系的位置是一定的,公式(1)設其變換矩陣爲objHbase 工具座標系與基座標系的變換關係也是一定的,一般由機器人廠家給定,設其變換矩陣爲toolHbase 相機綁定在工具上,所以相機相對與工具的位置也是一定的,設其變換矩陣爲 toolHcam然後和單目標定一樣,由校正板的原點在工件座標系中的位置假設用obj表示,由相機又可得到這個點的像素座標假設用cam表示,然後obj×H1×H2×H3=cam,通過拍攝多組圖,可以解得其中的三個矩陣方程。即可得到toolHcam,即相機座標系和工具座標系之間的位置關係。實際拍攝抓取時可獲得像素座標,通過上面公式(1),就可得到objHcam ,然後右乘以 toolHcam的反矩陣,再右乘以baseHtool的反矩陣,就可得到objHbase 。即工件在基座標系中的位置,如公式(2)所示。
 (2)
(2)
(2) 工作平面校正自動校正
要做到工作平面校正的功能要先知道校正板之於手臂的旋轉矩陣()跟平移矩陣()這兩個矩陣可以由手臂的座標(跟)、手臂校正的旋轉()跟平移()及相機跟校正板(Object)的旋轉()跟平移()來求得,其關係如公式(3)所示。
 (3)
(3)
回文章內容列表更完整的內容歡迎訂購 2022年03月號 (單篇費用:參考材化所定價)
主推方案
無限下載/年 5000元
NT$5,000元
訂閱送出