- 回首頁
- 機械工業雜誌
- 歷史雜誌
摘要:隨著物聯網技術的興起,工業上對於機械系統運轉狀況之即時回報功能也受到重視,其日漸成為主流研究目標。本文主要就永磁同步馬達之線上監測技術,透過開發外掛硬體的方式,進行非侵入式之即時磁場量測。此外積分電路的應用也將在本文中引入,利用其對馬達脈寬調變驅動系統之電壓量測能力,能精準還原出原始電壓並大幅提升馬達磁通估測效能,之後再透過已知參數進行永磁磁通解離,以完成即時馬達永磁場狀態監測目的。本文將以健康、均勻退磁(剩餘磁力60% , Uniform Demagnetization UD)及區域退磁(單槽磁力剩餘0% , Local Demagnetization LD)三顆400W馬達進行磁通估測器效能驗證。
Abstract:With the rise of the Internet of Things (IOT) technology, the industry has also paid more attention to the real-time monitoring of the operation status of the mechanical system, which also has gradually become the mainstream research object. Therefore, this article will focus on the online PMSM status monitoring, and conduct non-invasive real-time magnetic field measurement by developing external hardware. In addition, the concept of the digital-integrator is implemented to meet this requirement, which can capture the duty-cycle of the Pulse-Width Modulation (PWM) and then reconstruct it back to the original voltage signals, then the precision motor flux is derived through the state-observer design and the magnetic flux is decoupled. In this way, the abnormal magnetic flux conditions of the permanent magnet can be detected. Three motors with customized magnets that represent Health, Uniform Demagnetization (UD, 60% flux in total) and Local Demagnetization (LD, 0 %flux in one pole) are used to validate the proposed method.
關鍵詞:永磁同步馬達、磁場狀態分析、外掛式電壓量測、狀態估測
Keywords:PMSM, Flux analysis, External voltage measurement, State estimation
前言
永磁同步馬達(PMSM) 有著高能量密度與高運轉效率等優點,現今已被廣泛運用於各種工業。近年來更是成為機器人、無人機與自駕車等新穎技術不可或缺之關鍵部分。然而,銣鐵硼燒結磁鐵作為大部分永磁馬達的磁場來源,有結構脆弱及對高溫敏感[1]等問題。若其受到高溫影響或是衝擊而產生損傷,其磁力的下降不但會使得馬達運轉效率降低,動力控制系統更是有可能因參數改變而進入不穩定狀態,最終導致停機也不無可能。由於在多數情況下馬達內部磁場狀況無法透過感測器直接測得,只能透過估測器[2]的方式來估算內部磁場狀態。而其估測準確度會受到電壓電流訊號源的精度影響,且在馬達低速低負載運轉情況下尤為嚴重。考量到傳統三相馬達變頻器中固有的死區時間延遲,命令電壓與實際電壓輸出在脈寬調變(PWM)之工作週期(Duty Cycle)上差異較大,作為估測器輸入會產生額外誤差。其他諸如透過外掛低通濾波器來量測馬達三相電壓的方法則會有相位延遲的問題。因此本文將引入數位積分器在電壓量測上之應用,並介紹其如何透過抓取脈寬調變工作時間來準確地還原系統輸入電壓,並探討其所量測的高精準度電壓對磁通估測的影響。之後則會說明本文所使用之改良式磁通估測器架構,及如何透過估測結果導出磁鐵磁通狀態。最後再以健康、均勻退磁及區域退磁[3]三顆400W馬達進行實驗驗證。
監測系統規畫
本段落分成三個部分,第一部分為外掛量測系統,說明如何將其以外掛的方式安裝在伺服馬達系統上。第二部分則介紹數位積分電路,解釋變頻器三相PWM電壓在進入外掛感測系統前所作的處理與原因。最後是積分電路量測進入微控制器後,再被還原成三相電壓的方法。
1.外掛硬體架構
本文所使用的外掛感測器包含電壓及電流兩部分,電流感測部分選用開放式霍爾感測元件(Hall Current Transducer)進行外掛式非接觸電流量測。而電壓部分則是使用三相端點電壓作為積分器輸入,不需取得中性點或是端對地電壓即可量測。因此對於一般市售伺服馬達驅動套組而言,本外掛量測架構可完全獨立於驅動系統,實現完全的外部量測方法,圖1展示了本文所提之外掛量測架構。
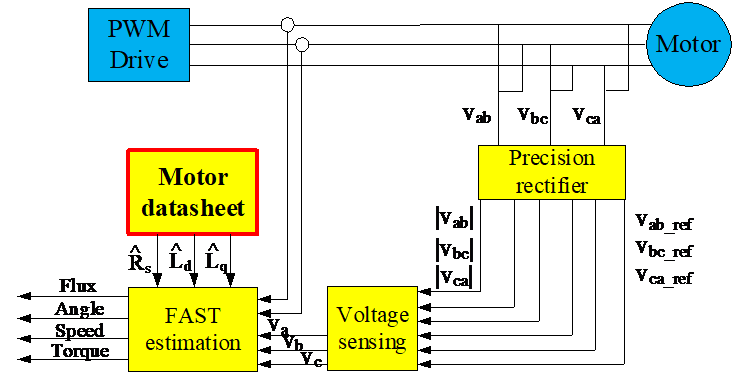
圖1 外掛量測架構
2.數位積分電路介紹
一般情況下,馬達輸出電壓可以透過電壓命令估測法來取得,其方法是透過驅動器晶片所給出的命令電壓,進行驅動器開關死區補償後,當作真實輸出電壓來使用。此方法雖然能夠避免外掛硬體架設所帶來的額外成本,但驅動器固有的死區時間所造成之非線性電壓誤差,在不同運轉狀況下會有相當大的差異。因此透過補償的方式難以完全還原成實際電壓,尤其是馬達在低速低負載運轉狀態時。除此之外,磁鐵旋轉所造成的反電動勢佔馬達電壓系統中很大一部分,其數學模型,如式(1)表示。
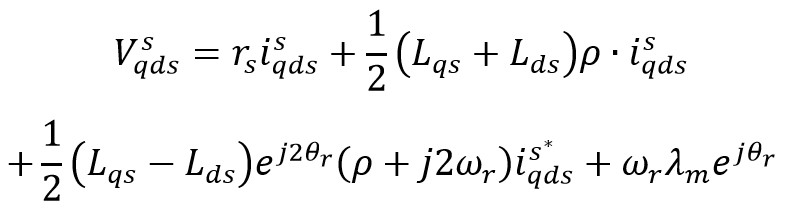 (1)
(1)
因此若要透過估測器來進行磁通估測,電壓回授的精確度乃是一大考量。為此本文使用數位積分電壓回授系統[4],利用計算PWM脈衝所佔時間來還原真實輸出電壓,其量測流程,如圖2所示。
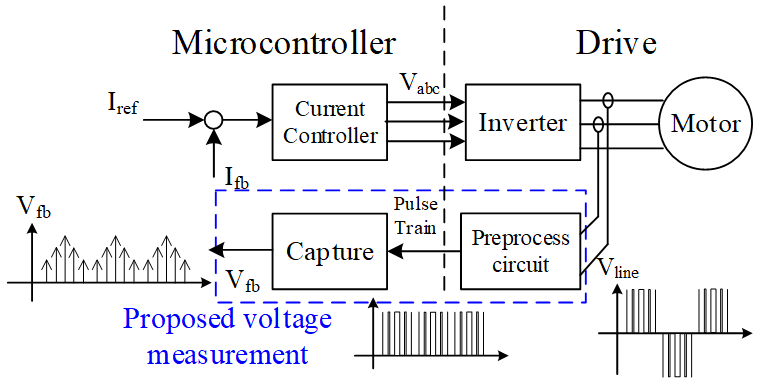
圖2脈寬調變電壓即時量測系統流程
更完整的內容歡迎訂購 2022年07月號 (單篇費用:參考材化所定價)
主推方案
無限下載/年 5000元
NT$5,000元
訂閱送出