- 回首頁
- 機械工業雜誌
- 歷史雜誌
繞射式深度感測元件之基材熱效應模擬分析
作者 張高德
刊登日期:2021/10/01
摘要
本研究主要利用繞射光學編碼、熱形變模擬及深度計算模型評估在不同材料下,由溫度所引起的深度計算誤差。由於溫度的上升使得繞射元件上的微結構形變,進而造成繞射光點的位移,對應的位移量造成深度計算誤差。由模擬結果可看到熔融石英(Fused silica)在溫度為60度時,其位深度誤差0.007 mm遠低於紅外光相機的成像解析度(0.2 mm),對比壓克力(Acrylic)材料則為0.885 mm,由此可見,在針對高精度的量測需求下,熔融石英材料為基礎的繞射元件,為目前最佳的解決方案。
Abstract
In this study, the depth calculation error caused by thermal effects are estimated for different materials by adopting diffraction optical coding, thermal deformation simulation, and depth calculation model. Temperature increase in a diffractive element leads to microstructure deformation, therefore result in diffractive pattern shift: The displacement of the diffraction spots would result in a depth calculation error. From the simulation results, fused silica at a temperature of 60 degree has the depth error about 0.007 mm, that it is much lower than the IR camera imaging resolution (0.2 mm). Compared to acrylic material, the depth error is approximately 0.885 mm under the same simulation condition. The results indicate that the diffraction components based on fused silica materials are currently the best solution for high precision measurement requirements.
前言
獲得周圍場景的深度資訊是電腦視覺領域的一個重要問題,主要應用在場景三維重建、遠距量測及視覺量測上;就現今深度測量技術而言可為,時差測距(time-of-flight,或稱飛時測距)[1]、立體視覺[2]與結構光測量方法[3]等。其工作原理為使用雷射光探測目標物,測定所發出的雷射脈衝往返一趟的時間換算而得。即發射一個雷射光脈衝,雷射光打到物體表面後反射,再由的探測器接收訊號,並記錄時間。由於光速c為一已知條件,光訊號往返一趟的時間即可換算為訊號所行走的距離,此距離又為儀器到物體表面距離的兩倍,故若令t為光訊號往返一趟的時間,則光訊號行走的距離等於ct/2。顯而易見的,時差測距其量測精度受到我們能多準確地量測時間t,因為大約3.3皮秒(picosecond)的時間,光訊號就走了1 mm。此外,產生深度資訊的解析度不高而且價格較貴;立體視覺測量,主要採用不同位置的兩台以上的相機經過移動或旋轉拍攝同一副場景,並通過計算空間點在不同圖像中的視差,以獲得物體的三維座標,但由於電腦計算量大,因而降低了測量速度;結構光(structure light)測量是一種主動式光學測量方法,與立體視覺方法差異是,利用結構光投射器代替一個相機,藉由被測物體表面的投射光點來計算幾何關係,進而得到物體的三維座標,具有計算簡單、體積小及價格低特點。其中,目前主流的技術為以繞射元件來進行結構光的光點分配及編碼,本研究主要針對不同材料在不同溫度下,模擬繞射光點的變化,進而評估對應的深度誤差。
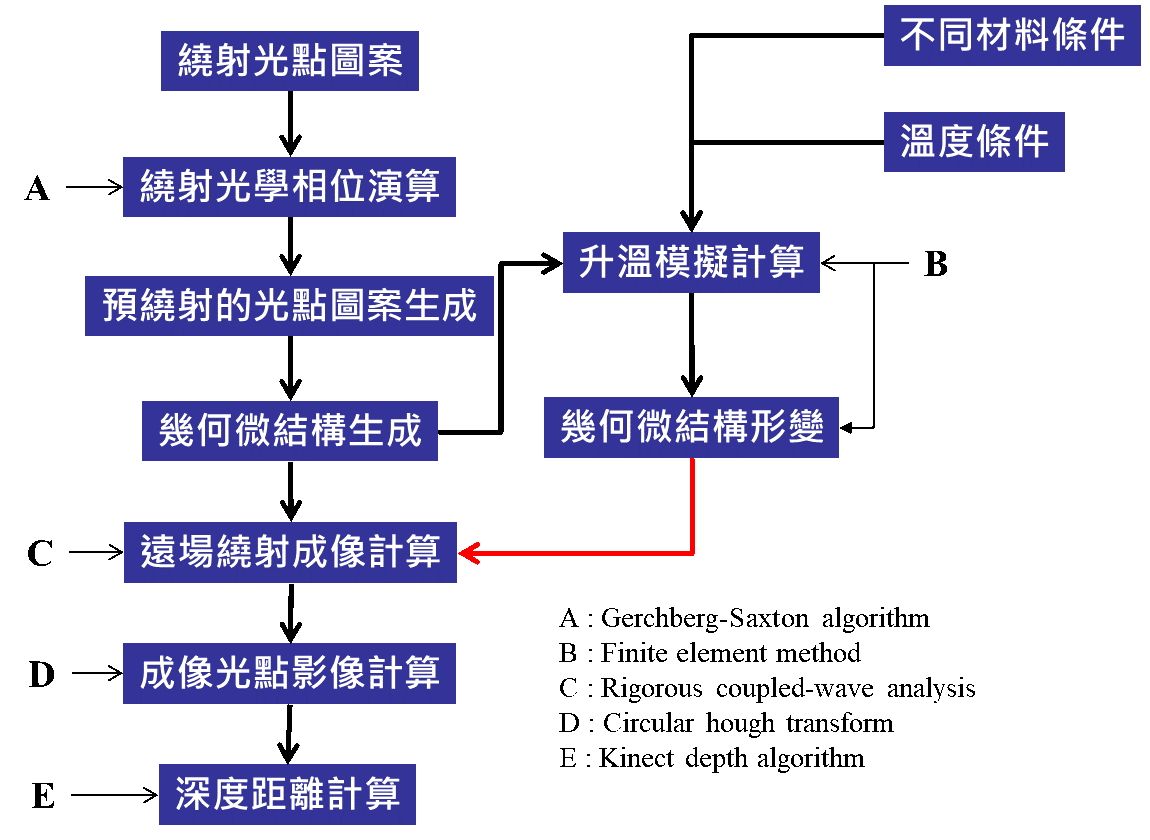
圖1 評估方式流程圖
設計原理
在傳統的繞射元件設計中,主要是利用電磁波的繞射原理來進行相位重新分佈設計,透過設計過的相位疊加進而達到特殊光點分佈[4],再由光點變化位移的程度反推空間深度資訊。在本研究中,其具體的模擬評估流程如圖1所示:首先針對所需的空間中光點分佈進行設計,再由電腦全像方式(Computer generated holograms, CGH)來進行光學編碼,在本研究中的編碼演算法為 Gerchberg-Saxton algorithm [5],此演算法透過反覆疊代電磁波在時域以及頻率域相位,來求出其想要的相位分佈,因此,只要時域及其頻率域的強度為已知,便利用傅立葉轉換來達成此目標。由光學編碼後可產生出一組相位分佈,可由此產生對應的幾何結構分佈,再導入有限元素法(Finite element method, FEM)進行熱傳及形變分析[6],即可得到不同材料及不同溫度下的熱形變量;結構形變量將會影響繞射角度,因此,可計算出對應的繞射角度及對應的相位分佈;接著再利用遠場繞射成像計算,可求出繞射投影的影像,並由影像分析及深度計算的方式進行位移及深度計算,最後比較在有無熱形變條件下,深度距離誤差數值比較。
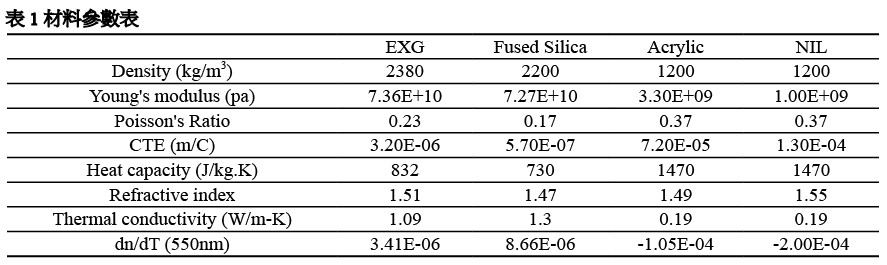
在本研究中對應的材料參數如表1所示,其中,材料的折射率及色散值則以550 nm為依據。其中,EXG為一種低膨漲係數的玻璃基板;同時本研究也將奈米壓印(Nanoimprint Lithography, NIL)的架構納入分析,此架構意指在EXG材料上以奈米壓印的方式,將高分子材料進行微結構轉寫,因此為一個雙層結構。
目前最常用的繞射編碼方式為Gerchberg-Saxton algorithm方式,其原理架構為將預定投影的繞射光點進行快速傅立葉轉換(Fast fourier transform, FFT),再進行繞射相位的條件限制,可得到其繞射出來的光場分佈,再經反向FFT可得到對應的相位,接著引入相位限制條件,可得出其光場分佈,由相位及振幅的限制條件來回修正疊加,即可求出預定投影的光場分佈結果,整個設計流程如圖2所示。
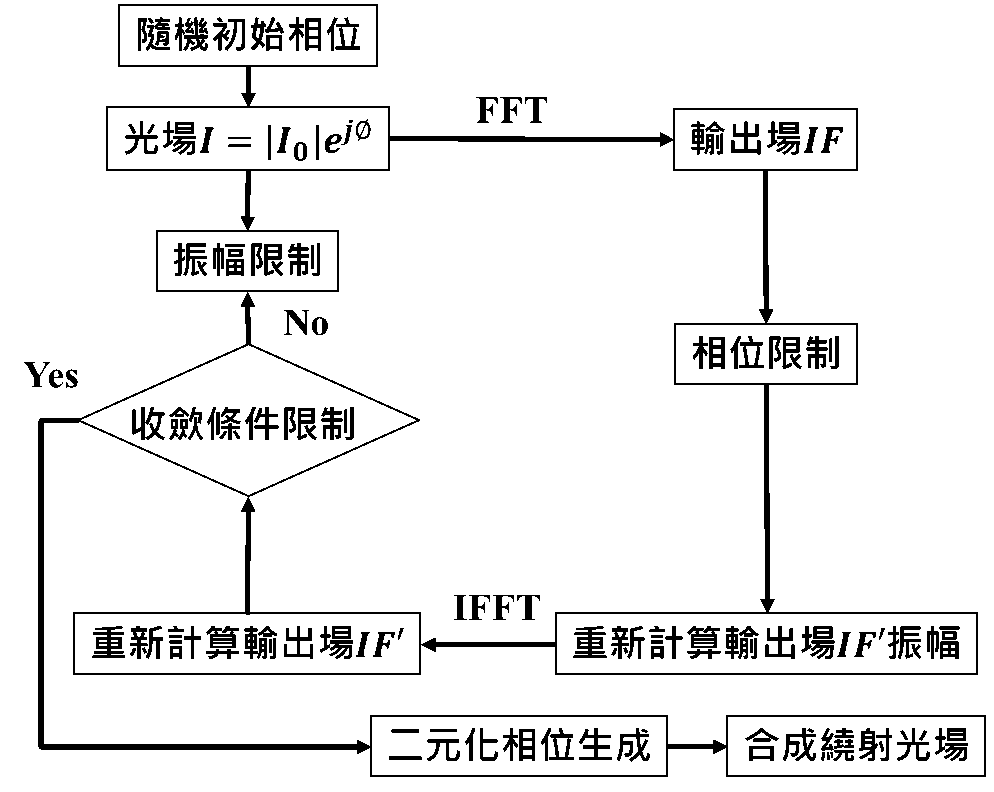
圖2 Gerchberg-Saxton algorithm流程圖
更完整的內容歡迎訂購 2021年10月號 (單篇費用:參考材化所定價)
主推方案
無限下載/年 5000元
NT$5,000元
訂閱送出