- 回首頁
- 機械工業雜誌
- 歷史雜誌
摘要:本研究應用電腦輔助工程 (CAE) 軟體 MotionView 建立電動巴士動力學模型,量測懸吊與轉向系統硬點、零部件特性以及整車重量、慣量與重心等實車參數並匯入虛擬模型,車輛操控性之模擬與實測誤差僅2.58%,驗證巴士動力學模型具備高度準確性。巴士動力學模型轉換為1D 降階模型,功能性模擬接口(FMI) 具備互通性,串聯車輛、馬達和電池系統等模型以實現整車系統模擬。在全球統一輕型車輛測試程序(WLTP) 條件下電動巴士能耗為每度電1.04 公里,與實車錄製數據比對,模擬結果之電量狀態下降情況亦呈現高度吻合,證明車輛模型與整車能耗估算相當可靠。
Abstract:In this article, an electric bus dynamic model is created by computer-aided engineering(CAE) software:Motion View. Real vehicle parameters such as hardpoints of suspension and steering system, characteristics of chassis components as well as center of gravity, weight and inertia of vehicle are measured and imported into the virtual model. There is only a 2.58% difference of vehicle maneuverability between simulation and tests which verified high fidelity of the bus model. The bus multi-body dynamic model is converted into the 1D reduced order model. Vehicle, motor and battery system models are connected by a functional mock-up interface(FMI) which retains interoperability that the full-vehicle system simulation is able to accomplish. Energy consumption calculation of the electric bus is 0.93 kilometer per kilowatt-hour under the condition of Worldwide Harmonized Light Vehicles Test Procedure (WLTP). State of charge (SOC) declined consistently between simulation and raw data which proved high credibility of the vehicle model along with energy consumption estimation.
關鍵詞:電動巴士、多體動力學、系統模擬、功能模型接口、能耗
Keywords:Electric bus, Multi-body dynamics, System simulation, Funtional mock-up interface, Energy
consumption
前言
全球電動巴士市場以43.1%年均複合成長率快速成長,預計2025 年電動巴士會有接近50% 的巴士市場占比。我國政府積極布局智慧電動巴士,目標2030 年達到1.17 萬輛市區公車全面電動化。國內現階段以滿足國產自製率為目標,因較缺乏完善的V型開發流程與整車系統整合能力,國產電動巴士性能與品質可靠度距離國際電動巴士大廠仍有一段距離,車體輕量化、電耗、操駕穩定
與乘適性等項目尚有改善空間。在設計階段準確評估車輛性能為當前產業欠缺之關鍵技術,為此,工研院機械所建立電動巴士虛擬開發平台,可對應7 米至12 米尺寸巴士開發。將高擬真的車輛動力學模型串聯馬達、電池等次系統模型,執行電動巴士能耗與續航力分析;虛擬開發平台亦可整合即時模擬開發系統,連結馬達動力計功率設備,實現硬體在環(Hardwarein-the-loop, HIL),用以驗證關鍵三電系統性能。此外,車輛動力學模型搭配虛擬耐久路面,由模擬取得車輛道路負載模式,作為車體結構強度與耐久計算的輸入條件,確認車體結構耐久與可靠度並產出輕量化設計,進一步提升電動巴士能耗。本研究透過一系列流程取得車輛參數匯入虛擬模型,再以軟體模擬評估車輛性能,協助國內巴士廠針對運行路線與駕駛模式估算能耗。藉由設計階段準確的可行性評估,不僅降低冗長且耗時耗成本的驗證與加速開發週期,更能透過先期的優化與改善設計方案,提高電動巴士品質可靠度,大幅提升國內電動車產業鏈於整車系統整合的技術力與競爭力。
電動巴士模型在環與能耗估算
1. 模擬軟體介紹
本文應用MotionView 軟體建立電動巴士多體動力學模型,圖1 為MotionView 軟體操作介面。在對應車輛動力學模型上,MotionView 提供乘用車、大客車與商用車等車型,以及車輛模型所需要的輪胎、路面、駕駛、彈簧、襯套、阻尼器、緩衝塊等子模型,能夠快速裝配出整車模型;也可根據使用者自定義匯入模型庫中,執行標準的懸吊分析、操控穩定性分析,甚至是提取車體結構強度分析所需的負載條件。Activate為應用於系統建模的開放式架構集成平台,可基於訊號或是物理搭建系統模型。使用1D框圖的方式,採取層次結構和參數化建模,可模組化與重複使用的超級塊(super block)利於大型複雜系統建模。圖2為本研究應用Activate軟體建立目標電動巴士整車控制模型,包含駕駛循環(Drive Cycle)、駕駛(Driver)、馬達(Motor)、傳動系統(Driveline)、車輛動力學(Vehicle Dynamics)、附屬系統(Ancillary Systems)、驅控器(Inverter/Converter)、電池系統(Battery Pack),以及計算續航里程 (Range Calculation)。其中車輛動力學模型、馬達模型與電池系統模型擬真度為本研究中執行能耗模擬中的重點項目,車輛模型由MotionView軟體建立的3D多體動力學模型降階為1D模型;馬達模型由FluxMotor建立的磁路分析模型降階為1D模型;電池系統則是採用以規格推導建立的自定義模型。
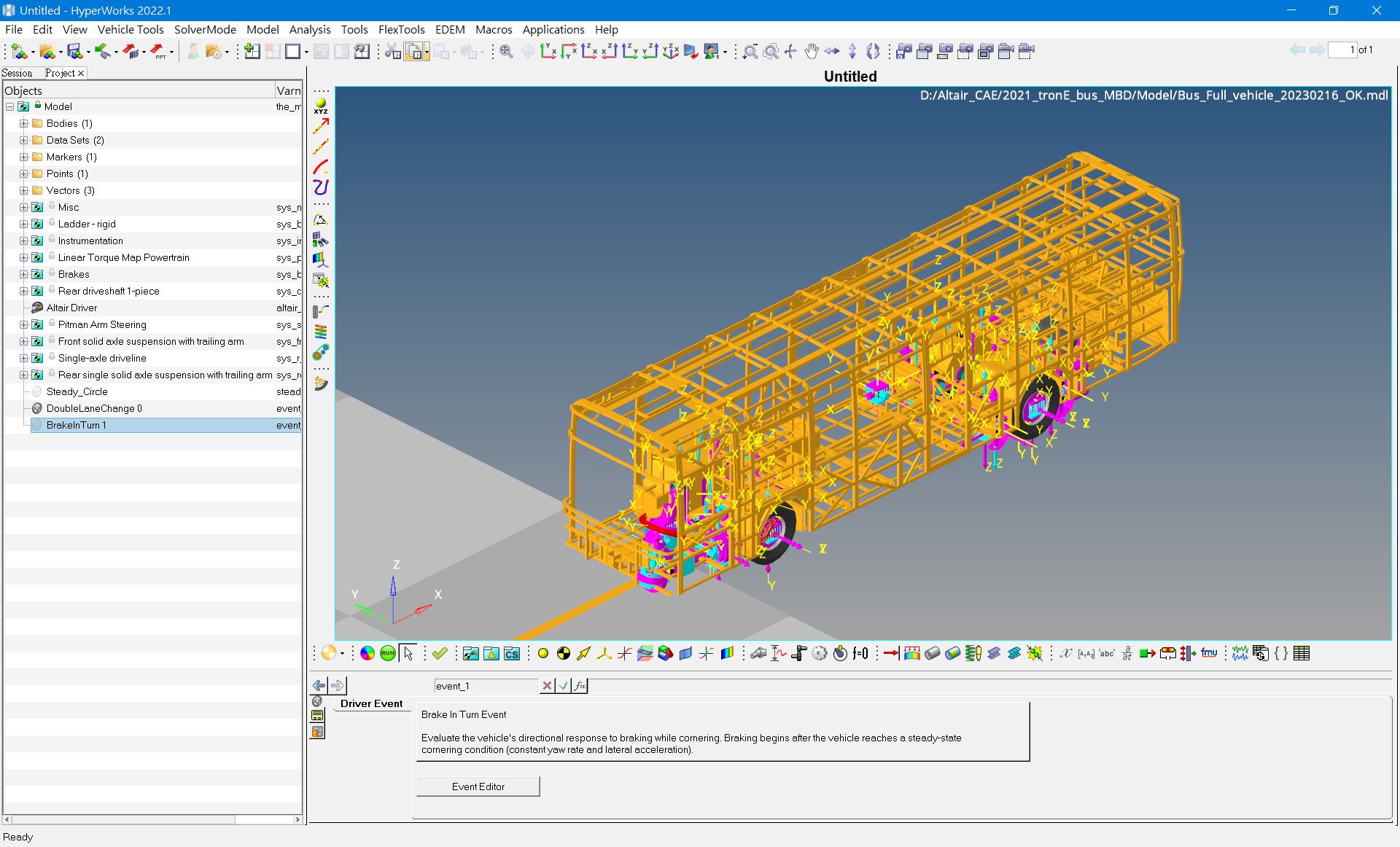
圖1 MotionView軟體操作介面
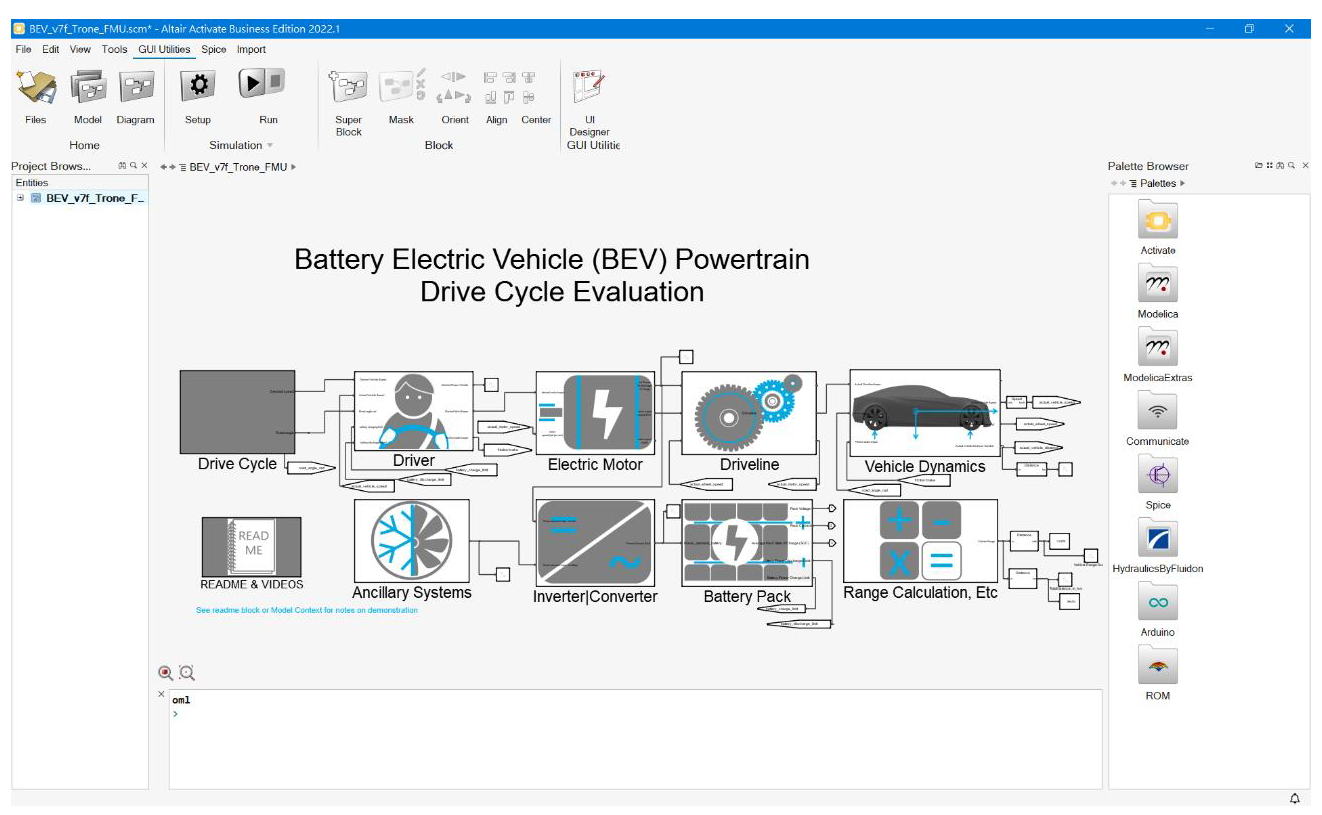
圖2 Activate軟體操作介面
- 電動巴士動力學模型建立
目標巴士由創奕能源科技股份有限公司(tron-e)提供,圖3為創奕能源的12米低地板電動巴士。本研究依據實際車輛懸吊形式建立前後半車模型,其中前軸採用ZF RL85A[1]一體式低底盤專用橋,包含兩具空氣彈簧、兩支避震器、V型連桿、阿克曼轉向機構連桿、防傾桿等機構,左前輪轉向節以球接頭連接轉向舵桿;後軸採用ZF AV132[2]低底盤專用橋組,包含四具空氣彈簧、四支避震器、V型連桿等機構,後側偏左的位置連接傳動軸與動力系統。本文參考文獻建立巴士車輛模型的方法:I. Kowarska等人在「Fully Equipped Dynamic Model of a Bus」[2]中使用多體動力學方法建立巴士底盤懸吊模型,並以數學式代入模型的懸吊零部件參數;G Georgiou 等人在「Modelling and ride dynamics of a flexible multi-body model of an urban bus」[3]亦採用多體動力學建立巴士模型,並假設避震器壓縮與回彈阻尼力值相等,而非取得真實的避震器阻尼力數據,由於越多的假設參數會讓模型越失真,故本文盡可能基於真實物理特性建立虛擬模型。首先,透過圖面規格與量測取得空氣彈簧、緩衝塊的剛性,以及避震器速度對應阻尼力的曲線。由於前後懸吊CAD圖面為設計狀態,本文執行逆向量測,取得目標巴士底盤懸吊與轉向系統在實際荷重壓地狀態下的硬點資訊並匯入MotionView軟體。在整車重量與重心計算上,採取一一輸入車體骨架結構、蒙皮、底盤前後軸懸吊與轉向、動力總成含控制器、電池系統、前檔與車窗玻璃、天花板、地板、蒙皮、座椅等重量,以及考慮乘客數(站/坐),再藉由地磅量測確認四輪荷重資訊推算實車重心位置,最終確認巴士模型重量與重心分布接近實車情況。本文依據ISO 14792[4]執行實車測試,前置作業包含確認車輛配重、四輪荷重、胎壓等,並架設IMC儀器、陀螺儀、GPS設備以記錄巴士速度與車身姿態等數據,並依據相同的操駕條件執行穩態繞圓轉向分析以驗證虛擬巴士模型的準確性。圖4為模擬結果與實際量測得到之側傾值比較,初始狀態兩者皆有微幅的側傾值0.02°,係車輛左右側荷重不均造成,車速30 km/hr通過半徑30公尺的彎道條件下,側向加速度約2.31 m/s2,模擬與實測的側傾值分別為0.755°與0.736°,誤差僅有2.58%,證明巴士動力學模型與實車具備高度一致性。

圖3 創奕12米市區低底盤電動巴士
回文章內容列表更完整的內容歡迎訂購 2023年04月號 (單篇費用:參考材化所定價)