- 回首頁
- 機械工業雜誌
- 當期雜誌
工業4.0 通訊技術於運動控制系統之應用與趨勢
作者 陸品丞、李宜靜、李宜玲
刊登日期:2019/05/01
摘要:工業技術已發展至第四次工業革命,近年來德國也提出工業4.0的概念,透過將數位化與虛擬化導入生產系統中,以打造智慧工廠為訴求,結合製造業與資訊技術,提出網路實體系統(Cyber-Physical System, CPS)的解決方案。國內外大廠也紛紛投入設備自動化、系統虛實化及工廠智慧化的發展。而互聯網在工業自動化領域中也逐漸占有重要的地位,但因為缺乏一個統一的通訊標準,使得資訊整合成為工業4.0的一大瓶頸。因此本文將介紹OPC UA (Open Platform Communications Unified Architecture)及MQTT(Message Queuing Telemetry Transport)兩種目前最新的通訊機制,並與機械手臂之運動控制系統進行整合。
Abstract:The fourth industrial revolution has been taking place in recent years. Germany has proposed the concept of Industry 4.0 by importing digitization and visualization into manufacturing systems with information technology, and thus the solution of Cyber-Physical System (CPS) has been promoted to create a smart factory. Domestic and foreign enterprises have invested in equipment automation, CPS system and the development of factory intelligence. Although the Internet becomes more important in industrial automation, the lack of unified communication standard makes the information integrating an obstacle for Industry 4.0. Therefore, the newest communication protocol OPC UA and MQTT will be introduced in this article and these protocols will be combined with an robotic arm and motion control system.
關鍵詞:開放平台通訊統一架構、訊息佇列遙測傳輸、工業物聯網 、運動控制
Keywords:OPC UA, MQTT, IIoT, Motion control
前言
順應工業4.0的潮流,國內各大廠皆積極推動工廠環境與作業模式的轉型,而虛實整合也成為了核心發展技術,透過整合工廠內各種設備的資訊,經由網路實體系統協助分析、處理與決策,提升產線設備的工作效率、故障排除及數據管理的能力。然而為了實現廠區內的工業自動化,未來勢必將導入更多物聯網設備來協助機台進行串聯與資訊蒐集,因此如何針對不同的應用情境選擇適合的通訊協定,對於系統的執行效率與擴展性也成為了關鍵因素。目前在物聯網的應用中,輕量級的通訊協定如MQTT、CoAP(Constrained Application Protocol)、XMPP(Extensible Messaging and Presence Protoco)、DDS(Data Distribution Service)、AMQP(Advanced Message Queuing Protocol)等,皆有利於使用在硬體受限的設備或是不穩定的網路環境中,這些輕量級的通訊協定也讓物聯網的應用可以觸及更多的應用層面。
另一方面,透過結合物聯網與工業自動化技術,產線設備除了擁有基本網路連線和資料傳輸的功能之外,在具備高運算能力的設備中,還可以進一步整合來自其它設備(如感測器)的資訊,透過生產參數進行自動分析及計算,提供後續維護策略和預防性維護等功能。由於目前工業控制器的種類繁多,配合HMI或SCADA等工業軟體的應用,供應商需要各針對不同機台類型進行軟體及資料整合,而導致效率低與擴展不易的問題。此外在製程自動化的領域中,當製程數據從分散式控制系統 (Distributed Control System, DCS)傳送到上層的製造執行系統與企業資源管理系統時,必須按照各個供應商的機台種類開發特定的通訊介面,使得企業在進行資訊垂直整合時遇到瓶頸,因此需要透過一套標準化的通訊機制來實現不同供應商和設備之間的資料通訊。
本文主要分為三個章節,第二章節與第三章節介紹OPC UA與MQTT的通訊技術與目前產業的應用情況,第四章節為整合OPC UA與MQTT的應用實例,透過結合工研院機械所開發之運動控制函式庫(Motion Control Command Library, MCCL)和運動控制軸卡,應用在機械手臂控制系統中。
OPC UA
1. OPC UA背景與介紹
OPC UA的發展可以追溯於1987年,Microsoft推出了動態資料交換(Dynamic Data Exchange, DDE) 通訊機制,DDE藉由共享記憶體的方式,讓不同的應用程式間可以動態進行資料交換。1990年,Microsoft將DDE改良後發佈了物件連結與嵌入技術(Object Linking and Embedding, OLE),透過複合檔的概念,使單一檔案能夠儲存如文字、圖形、視訊與聲音等多重資料格式,但由於OLE的架構過於複雜,以至於鮮少廠商使用此技術進行內部資訊的整合,所以之後便發展出COM(Component Object Model)/DCOM(Distributed COM)技術。由於當時工業自動化領域還未有一個統一的通訊標準,軟體廠商需要針對特定機台與專屬的通訊協定製作特殊的驅動程式,使得機台資料的擁有權成為工業市場主要的爭奪點,因此在1995年時,四家自動化公司組成一個專案小組,依據OLE與COM/DCOM技術制定一個用於工業自動化資料存取(Data access, DA)的通訊規範,這也成為了早期OPC(OLE for process control)的基礎,專案小組於隔年發佈了OPC 1.0版並成立OPC基金會。
OPC通訊規範的核心為解決互通性 (Interoperability) 和標準化(Standardization) 的問題,透過Client/Server的方式來達成資料傳輸,所以在整合應用時只要設備支援OPC規範即可輕易地交換資訊,大幅減少硬體設計者、軟體合作廠商、SCADA及HMI廠商在建立與整合設備管理介面上所需要的時間成本。由於OPC是第一個能將自動化數據與資訊系統進行整合的通訊規範,並支援不同類型的設備及控制器,因此OPC在設備製造商和自動化軟體供應商中受到廣泛支持,經過多年的發展後,OPC額外添加許多機制以增強DA規範,並將OPC重新定義為開放平臺通訊 (Open Platform Communication)。
2006年,OPC基金會將OPC的功能整合成一個可擴展的服務導向(Service-Oriented)架構,即為OPC UA,OPC UA涵蓋了OPC資料存取規範 (OPC DA)、歷史資料規範 (OPC HA)、報警與事件規範 (OPC A&E) 和安全協議 (OPC Security)等功能,並在其基礎上進行功能的擴展,OPC UA的基本架構如圖1所示。有別於傳統的OPC,OPC UA有以下5項特點:
(1)資訊瀏覽統一性:OPC UA有效地將現有的OPC規範 (DA、A&E、HA、命令、複雜資料型態和物件類型)進行整合,並提供了一致、完整的定址空間(Address Space)和服務模型,解決過去相同系統的資訊不能以統一方式讀取的問題。
(2)擴充通訊性能:OPC UA 規範可以通過任何通訊埠(Port)進行資料的傳輸,解決傳統OPC因資訊系統防火牆導致資料被阻擋的問題。訊息的編碼格式可以是XML或二進位格式,也可使用多種通訊協定進行傳輸,例如TCP、HTTPS、AMQP和MQTT等。
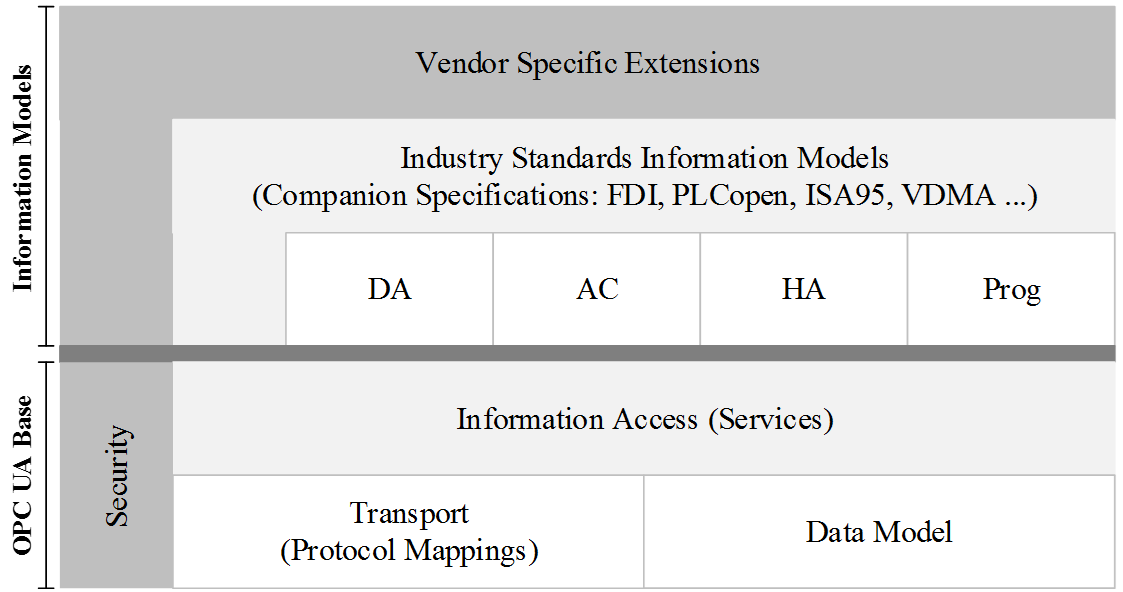
圖1 OPC UA基本架構
更完整的內容歡迎訂購 2019年05月號 (單篇費用:參考材化所定價)
主推方案
無限下載/年 5000元
NT$5,000元
訂閱送出