- 回首頁
- 機械工業雜誌
- 當期雜誌
摘要:本論文研究內藏式永磁同步馬達在全速度操作域最大效能之輸出控制開發,在額定轉速內使用最大力矩控制產生最大定力矩輸出,在額定轉速外使用弱磁控制產生最大定功率輸出。針對最大力矩控制,本論文推出定45度m-t軸最大力矩控制方法,可簡化一般參數型的根號計算,讓系統能有相同最大力矩輸出的前提下也能有更少的計算時間。針對弱磁控制,本論文將比較前饋型弱磁控制以及回授型弱磁控制的暫態與穩態響應,並針對其需要的參數設定以及弱磁控制器設定加以優化,讓這兩種弱磁控制都能實現相近的最大定功率輸出。
Abstract:This paper develops an internal permanent magnet synchronous motor (IPMSM) controller to maximize the drive performance under the same energy usage. Maximum torque per ampere (MTPA) control is used to maximize the torque output below rated speed. Flux-weakening (FW) control is implemented to maximize the power output beyond rated speed. From the perspective of MTPA, a fixed m-t axis current control is proposed during the constant torque region at low speed. Conventional MTPA control requires the differentiation of nonlinear torque equation to obtain corresponding d- and q-axis current, leading to complicated nonlinear mathematical calculation. Under this effect, conventional MTPA results in considerable controller memory and calculation time. From the perspective of FW, both feedforward and feedback control methods are compared to identify a suited FW controller. It is shown that the feedforward FW control results in fast dynamic responses; however, the parameter sensitivity is the primary control issue.
關鍵詞:內藏式永磁同步馬達、最大力矩控制、弱磁控制
Keywords:IPMSM, MTPA control, FW control
前言
二十一世紀以來,科技進步,從以前的土法煉鋼、蒸氣技術、電力的大規模應用,一直到現在的工業自動化時代,許許多多的工具機、機器人,都需要共同的核心來達成,那就是馬達,而永磁同步馬達(Permanent Magnet Synchronous Motor , PMSM)更是受到許多學界跟業界的注目眼光,因為它有著體積小、高效率、高功率密度的優點[1],比起有刷直流馬達,它更不用做定期維修碳刷的工作,變速範圍也比較廣。
處在現今的年代,能源並非取之不盡、用之不竭,經過文獻統計[2],約65%的工業電力能源皆用在馬達之上,就像當我們使用永磁無刷馬達時,也必須盡量提高使用的效率,像是在一定轉矩下降低電流的使用,不僅能夠降低總功率的使用,還能降低瞬間電流過大以導致短路的可能性,或者是在一定電流限制下,最大化力矩或功率的輸出[3, 4]。
降低使用電壓也是另外一種提高馬達效率使用的方法,一般如果必須將馬達轉速提高到額定轉速以上的話,通常都需要提高電壓,有些馬達甚至需要提供它數百伏特以上的電壓才能讓它在兩三倍的額定轉速下能穩定運轉不失控,因此如果在額定轉速以上能降低電壓使用的弱磁控制技術[5],甚至能夠在一定電壓限制的情況下,就能夠把馬達轉速提升上去。
本篇論文主要目標為研究額定速度內及額定速度外的兩種不同控制方法,主要研究內容包含: A. 實現定45度m-t軸MTPA控制並與一般MTPA控制方法比較其計算時間及力矩輸出;B. 比較前饋型弱磁控制及回授型弱磁控制方法的暫態及穩態響應。
MTPA及弱磁控制
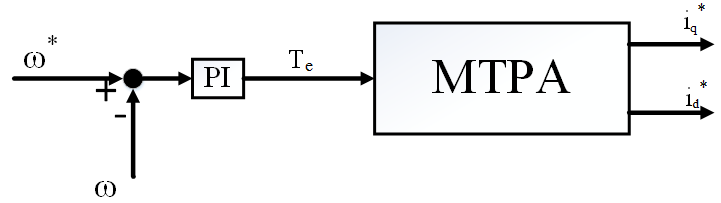
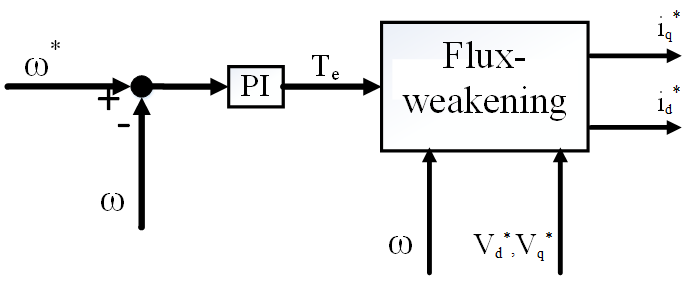
圖1(a)解釋具有MTPA控制的速度閉迴路訊號流程圖,是整個MTPA控制的演算核心,將速度控制器的輸出,即力矩命令送給MTPA演算法控制裡,然後在線算出i*d, i*q組合給電流控制器使總電流最小化,達到MTPA控制的目的。圖1(b)是具有弱磁控制的速度迴路流程圖,經由速度控制器的輸出告訴控制器需要多少的力矩,再跟目前的速度回授跟電壓命令的需要一起送入弱磁控制的演算法,計算需要給出多少的id,iq到電流控制器,才能在超過額定速度之上然後加載的情況下穩定運轉在馬達的定功率區間,成功達到弱磁控制的目的。
(a) (b)
圖 1 (a)具有MTPA之速度閉迴路控制流程圖 (b) 弱磁控制流程圖
1. 定45度m-t軸MTPA控制
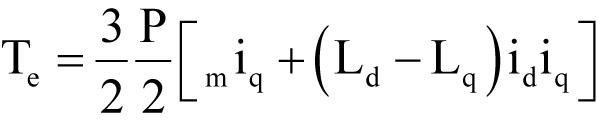
本論文馬達研究對象將採取內藏式永磁同步馬達(IPMSM),因為IPMSM本身磁通分布原因讓Ld < Lq,有電磁轉矩跟磁阻轉矩這兩項力矩輸出,如(1)式,是非常適合實現MTPA控制的特點,所以希望在額定電流源的限制下,找到一組最佳的(id, iq)組合,讓力矩輸出能夠最大,提升馬達的效率。
 (1)
(1)
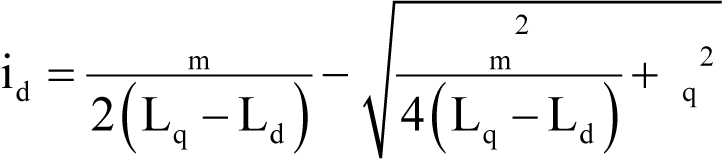
其中Te為輸出力矩、id為d軸電流、iq為q軸電流、Ld為d軸電感、Lq為q軸電感、λm為轉子磁鐵磁通、P為極數。而一般參數型的MTPA控制就是將(1)式對角度作微分,即可取得一個最佳的id與iq之間的角度,所以經由微分後可以推出一個參數型(需要d-q軸電感,磁通)的MTPA公式,如(2)式。
 (2)
(2)
用(2)式就能夠模擬出MTPA的曲線,只需要知道d-q軸電感跟磁通就可以模擬出id, iq之間的關係,不需要先畫出每條定力矩線,就能由MTPA曲線直接得知每個id對應下的iq搭配,如圖2(a)所示。

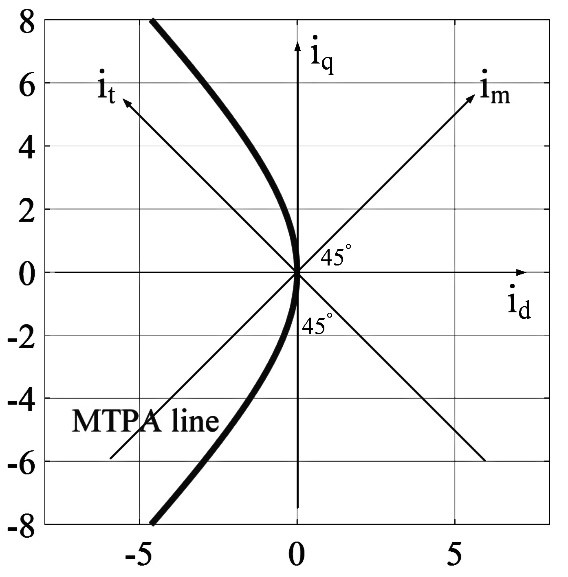 (a) (b)
(a) (b)
圖2 (a) MTPA模擬曲線 (b)d-q軸轉換45度成m-t軸MTPA模擬曲線
上述的一般參數法MTPA是一個非常常見的控制方法,如(2)式,但公式裡面含有除法跟開根號計算,這兩種計算比起加法跟乘法而言需要更多的執行週期跟程式記憶體空間,此外過多的在線計算乘法跟根號可能會花更多時間。文獻[30]所提出的M-T軸控制,目的在於合成轉子磁通與定子磁通,轉換(1)式之非線性磁阻力矩成線性的電磁力矩,但是M-T座標軸的決定,取決於總合成磁通的估測準確度,本論文有別於[6]提出的隨操作點而變動的M-T座標轉換,試圖直接把d-q軸旋轉固定45度之m-t座標之上,如圖2(b)所示,此方法亦可以線性化整個力矩方程式,同時跟傳統d-q軸控制一樣,可以藉由d-q兩軸電流計算所需力矩,排除磁通估測對MTPA的影響。
更完整的內容歡迎訂購 2019年05月號 (單篇費用:參考材化所定價)
主推方案
無限下載/年 5000元
NT$5,000元
訂閱送出