- 回首頁
- 研究與發展
研究與發展
全數位軟體運動控制平台 2022/07/28

簡介 Introductions
EMP-S 以 EtherCAT 通訊作為基礎,使用者透過乙太網路傳送資料封包至 EtherCAT 從站 ( 例如:伺服驅動器、周邊 I/O 模組 ) 進行資料交換,在通訊架構上為分散式時脈(DC),提供一相容於 EtherCAT 通訊協定的運動控制函式庫 (MCCL),可以讓驅動器及 I/O 模組的命令更新週期達到 250μs,保證各從站間同步誤差小於 1μs;有別於傳統運動控制系統,EMP-S 不需額外的硬體,只需透過標準網路卡即具備多軸運動控制能力,並在配線上具有彈性及靈活等優勢。
The EMP-S platform is based on the Ethernet for Control Automation Technology (EtherCAT) communication protocol. By using the EtherCAT Motion Control Command Library (MCCL), the EtherCAT master sends commands as packets through the Ethernet network to the EtherCAT slaves (servo drives, IO modules, etc.) while these send their status as feedback. Distributed Clocks (DC) are used in the communication layer, allowing the EtherCAT slaves to reach 250 us latency. In low-latency synchronized applications, a delay below 1 us has been verified. Unlike traditional motion control platforms, the EMP-S neglects additional hardware whereas remains capable of running multi-axis motion control using a standardized network. One of the main advantages of the EMP-S is its wiring flexibility.
特色與創新 Characters and Innovations
- 支援 EtherCAT 通訊控制伺服驅動器、I/O 模組。
- 支援多軸同動運動命令路徑規劃。
- 支援關節型機器手臂軌跡規劃。
- Supports EtherCAT control for servo drives, and I/O modules.
- Supports multi-axis synchronous-motion path planning.
- Supports articulated robotic-arm trajectory planning.
應用與效益 Applications and Benefits
- 全數位網路多軸精密伺服控制。
- 高響應及高效能的工業控制產業。
- Fully digital multi-axis high-precision servo control.
- High-response and high-efficiency in industrial applications.
聯絡 contact
更多資訊
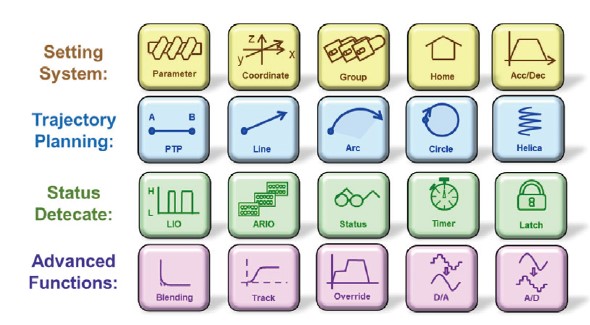
MCCL 運動控制函式庫