
彭毓瑩副組長、姜曉峰經理 /工研院機械所
前言
自駕車技術發展起源甚早,甚至可溯及1930年代,但較接近現代技術的全球第一臺自駕雛型應是1987年美國CMU大學的NavLab1,不過,自駕車技術的快速發展,應可由2004年3月DARPA(Defense Advanced Research Projects Agency,國防前瞻研究計畫局)第一次發起無人駕駛挑戰賽算起。台灣自駕車技術發展可追溯到2004年交大吳炳飛教授團隊的研發成就,當時該團隊的Taiwan iTS-1實驗車便能以145公里的時速循車道標線高速自動駕駛,也曾經分別以時速90 公里與110公里各在68號快速路與國道3號高速公路完成自動駕駛實車驗證。
最近十年,自駕車技術突飛猛進,號稱具有SAE Lv3自動化能力的奧迪A8於2017年上市,而諸多Lv4甚至Lv5的自駕車也在路上貼著群眾實驗了,但是,法規、標準等則在後頭猛追。本文擬從國內外的法規和知名企業的安全自評報告(VSSA-Voluntary Safety Self-Assessment),和讀者一起探討如何讓自駕車安全地上公共道路做實驗。
2018年,我國自駕車技術研發邁向另一個旅程碑
2018年4月中旬的車電展,車輛中心在四天展期裡提供自駕接駁車(e-golf)在特定的封閉場域讓民眾上車體驗 [1] 。
2018年4月在桃園新屋的農業博覽會,市府導入由台灣智慧駕駛公司改造自高爾夫球車的自駕車,在園區內數百公尺的特定道路上的特定時段供大眾乘坐體驗 [2]。
2018年7月上旬,工研院以電動商用車和中型電動巴士公開展示自駕車技術。機械所電動商用車以同時地圖建置與定位技術(SLAM-Simultaneous Localization And Mapping)克服GPS訊號遮蔽的問題,並以即時感測融合與決策技術,實現在時速近60公里的自駕;同時,可在中興院區人車混流的真實路況以時速30公里以下的速度運行,無須任何交管且無論晴雨晝夜等天候皆能運行[3]。
2018年9月華創與宏碁合作在「2018 台灣汽車科技創新發展高峰會」會場,以納智捷S3電動車為平台,展示台灣自主研發首部智駕電動概念車,及準 Level 4 等級的自動駕駛技術與系統 [4]。
2018年12月,工研院資通所的電動自駕中巴在台中水湳經貿園區的半封閉道路展示並供民眾搭乘體驗 [5]。
2018年11月,成功大學與喜門史塔雷克、Easy Mile簽署國際產學合作備忘錄,就自駕車行動資訊整合、交通營運服務、數據應用及數位基礎建設等創新可行模式進行產學合作 [6]。
這一年,無論車輛業者、學術單位、或法人研究單位,陸陸續續的將過去在自駕車的研發成果,在各種不同的封閉場域,藉由測試、展示、體驗、試營運等方式做不同程度的展現。
2018年,政府在協助產業發展自駕車技術上扮演一個極重要的推手,包括:
11月30日《無人載具科技創新實驗條例》在立法院三讀通過,隨後在12月19日 由總統公告[7]。該條例引進監理沙盒精神,允許自駕車等無人載具暫時排除現有法規,賦予各界於實際場域進行無人載具科技、服務及營運模式的創新實驗。
2018年12月底,交通部公告完成增修道路交通安全規則第 20 條相關規定[8],並增加附件二十一相關條文,讓自駕車可以依據該規定申辦領用試車牌上路試車,並公布該新規定於2019年元旦實施 [9] [10]。
另一項令人為之振奮的,是自駕車測試封閉場域-台南沙崙場域的建設,該場域主要設施已於2018年底完工,並已於2019年2月底開張啟用 [11]。
2019年是台灣自駕車上路實驗的元年
傳統的車輛開發,新技術研發趨於成熟時,必定會經由各種數值模擬與分析、台架或設施模擬測試、(賽)跑道模擬測試、環境測試….等。但是,自駕車的決策與控制是由機器負責,完全不同於由駕駛者判斷和操控的傳統車輛,況且,自駕車的行為決策又是基於感測器偵測結果而定,所以,如何驗證自駕車的判斷和控制能力,便面臨前所未有的嚴峻挑戰和實驗過程,例如,自駕車在真實世界的”試車”,道路上的任何人和車等動態物體皆是實驗參與者,甚至於是無法事先設定的一種實驗設施,所以,自駕車上道路實驗之前,出現封閉場域的模擬實驗。
沙崙測試場域是台灣第一座具有標準設施的自駕車專用封閉式模擬測試場域如圖1所示,設置目的為協助推動台灣自駕車產業發展,提供業者產品測試與展示,兼具民眾體驗、社會大眾教育功能。基地總面積約2.2公頃,測試區的面積約1.75公頃,可供小型車或中型巴士之自駕車以低於30公里的時速進行模擬測試;雖然規模和面積遠低於美國M-City、日本J-Town、韓國 k-City,但該場域濃縮了台灣城市、郊區常見道路型式與行車情境是其特點。場域內規劃台灣常見的13種道路情境,包括:十字路口/行人穿越道、城市街廓與場景、3個出入口的兩車道圓環、戶外停車區等四種市區道路情境; T字路口(有/無號誌燈)、彎道、車道縮減等3個郊區道路情境;以及,隧道、鐵路平交道、候車亭、綠蔭、金屬鐵橋路面、水泥路面(含橋梁接縫)等6種特殊路況情境。

圖1 沙崙封閉場域的13種道路情境
自駕車能否上路實驗,未必全然是科技問題,還涉及法規等規範。根據2018年2月的全國法規資料庫,《無人載具科技創新實驗條例》尚屬公告中,最後生效日期尚未定,條例施行日期將由行政院定之[12]。不過,從該條例之第二章(申請及審查程序)、第三章(實驗場域之管理及安全)、第四章(創新實驗之辦理、廢止及報告)、及第五章(法令於實驗期間之排除適用)等條文,本文特別整理出自駕車創新實驗的申辦流程供讀者參考,詳參圖2。
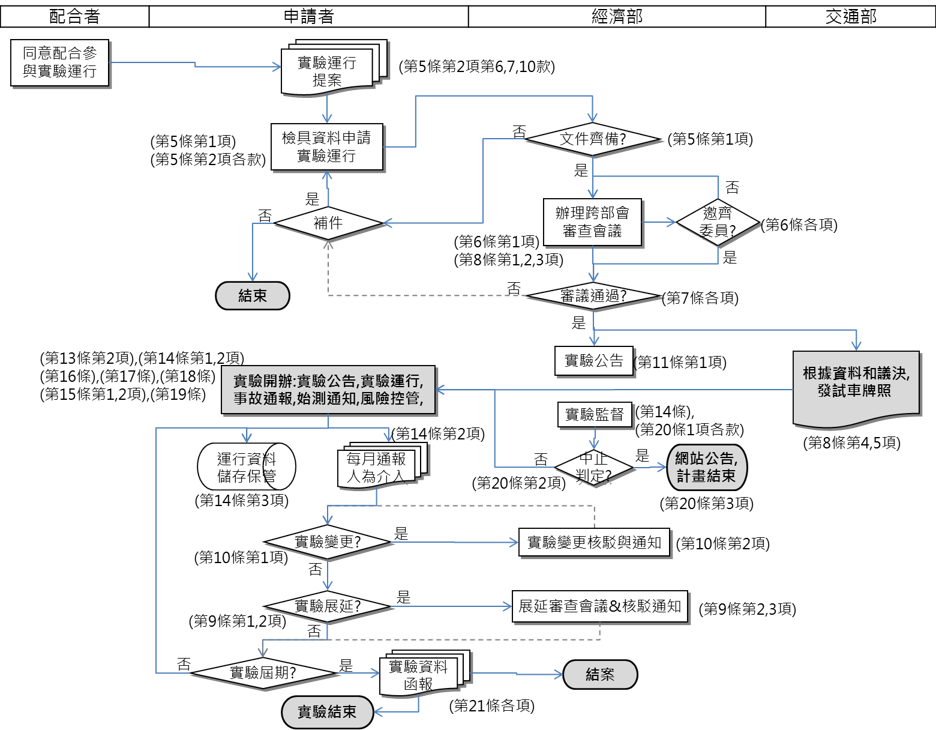
圖2 無人載具科技創新實驗條例之實驗申請流程
在條例第五條,羅列總共二十一項的規定,是申請者於提案時應特別注意的重點,尤其是與車輛和實驗者相關的安全措施,申請者要提出完善的說明或證明。例如,第三項要求申請者必須明確訂定創新實驗之範圍、期間、規模,並且必須完成對應的模擬分析或封閉場域實驗,以資證明創新實驗已具備基本能力;對於實驗車輛的安全措施亦有所要求,諸如,第十一項(設置運行紀錄器及紀錄資料);第十二項(載具或裝置符合安全性之文件);第十三項(載具與監控人發生通訊故障時的因應措施);第十四項(潛在風險及降險措施) ,和第十八項(資訊系統安全控管措施);還有,須提出對於交通環境衝擊與影響的分析與對策,例如,第十五項(交通影響及因應措施);以及,對實驗者的保障措施,如第十六項(實驗者之保護措施);第十七項(投保保險之規劃)。
雖然本文付梓時,《無人載具科技創新實驗條例》尚未公告實施日,但各界自駕車若要上路實驗,可先循交通部於今年元旦實施的《新版道安規則第20條》相關規定辦理,在此略作說明以饗讀者。
《新版道安規則第20條》附件二十一「自動駕駛車輛申請道路測試作業規定」要點探討如下:
該規定之第一條明訂「測試車輛」只能在特定時間及條件下,開啟自動駕駛系統功能取代人為操控之測試車輛;第九條明訂車上必須配置駕駛操控人員,該員應於駕駛座上或可直接操作測試車輛之位置;在第八條對於測試車輛的資料紀錄器、操作的人機介面、車身標示、車輛安全維護等必須符合多項規定;並規定資料紀錄應保留事故或事件發生前六分鐘之行車影像,以及前三十秒、後十秒之其他資訊。
對於實驗場域及環境亦有相關規定,例如,第十條關於測試環境安全規定,明訂測試路線、時間、車速、天氣限制條件等細節,也必須對外公告並設置警語;以及第十二條的道路使用規定,若欲改造測試區域內之任何道路設施,還要主管機關同意,甚至於繳交押金。
該規定第二條第二款要求申請者應提交:自動駕駛車輛道路測試申請書、申請者承諾書、自動駕駛車輛道路測試計畫書、公司登記立案證明文件、保險證明文件、測試車輛所有權或使用權證明文件、以及駕駛操控人員證明文件。
在第二條、第四和第五條則明訂申請流程與要點,例如,受理機關經初步審查之後,還要交通部的審查,審查內容包括諸如國內外封閉場域測試或國外一般道路測試之報告或證明文件、風險控管措施、保險額度、車輛之各項功能與設備等各個要項,還有,繳交審查費新臺幣五萬元,亦可能被要求實地會勘與評估,審查單位於收到申請案後六十日內才會作成決議,這些與之前申請試車牌有諸多大不相同之處。本文整理其申請流程,如圖3。
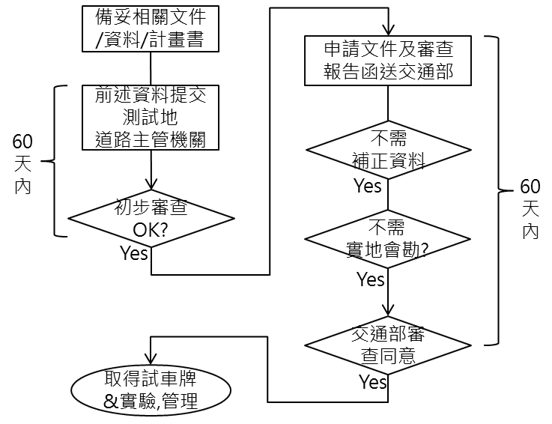
圖3 交通部自駕車試車牌申請流程概要
他山之石-2012年是美國自駕車上路實驗元年
2011年,內華達州公告了美國第一個讓自駕車上路的法案[13],2012年5月核准了全美第一張「自駕車」牌照,這張牌照是由谷歌申請到的,掛在其改造自豐田Prius的自駕車上。
根據美國NCSL(National Conference of State Legislatures)官網的資料,各州對於自駕車上路實驗的規範各有不同,立法的州政府從2011有1個,2012有6個,2013有9個州1個特區,在2014達12個州,2015年達16個州,2016年再增4個州而達20個,2017年已有33個州立法。
到去年2018年為止,全美允許自駕車上路實驗的州和特區的共有37個,參考圖4。當中,僅制定專法規範者有25個州,僅以行政命令規範者有7個州,兩法並行者有華盛頓、威斯康辛、伊利諾、緬因等4個州,以上皆規範自駕車上必須有車輛駕駛者;目前,僅有亞利桑納州和加利福尼亞州分別於2018年3 和4月公告自駕車內可無駕駛者跟隨,根據加州DMV官網及報章雜誌報導,Waymo已於2018年10月於加州被核准車上無人駕駛之自駕車的測試[14]。各州立法的詳細情況參考圖5。
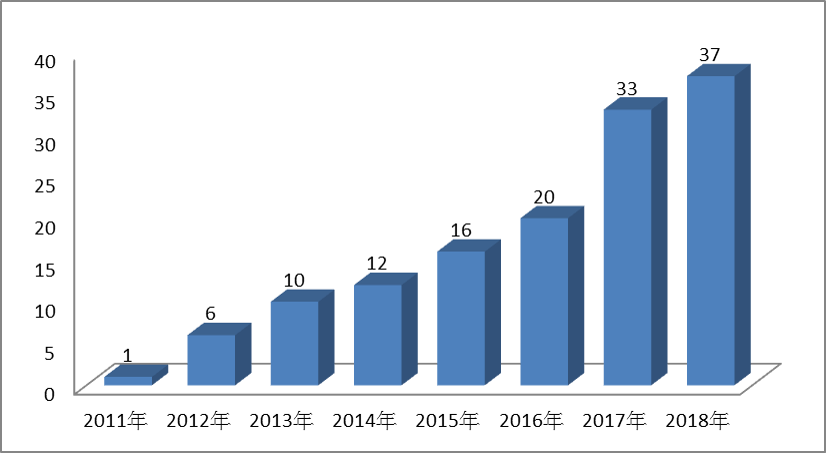
圖4 美國立法自駕車上路的州(含特區)數成長圖
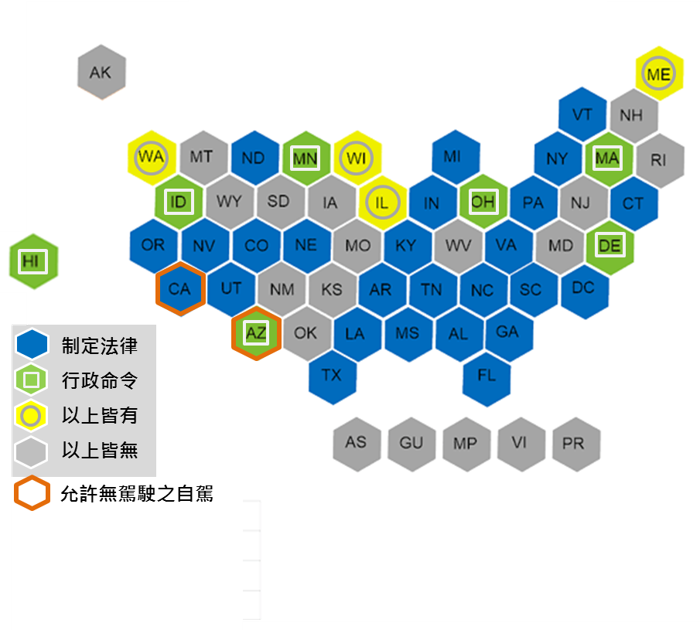
圖5 美國各州讓自駕車上路實驗的立法狀態(改自美國NCSL官網資料)
2015年美國亦創全球之先河,啟用全球第一座自駕車封閉場域,當年7月密西根大學(University of Michigan)與該州交通局(MDOT)合作打造仿真模擬城市「Mcity」正式開放[16][17]。Mcity占地近 13 公頃,為全球第一個專為連網、無人自駕汽車技術所打造的可控式模擬道路環境。整座 Mcity 模擬城市的環境造景與交通設施,可說與實際城市街道差異不大,有交通號誌、馬路街道、圓環、隧道、人行道、自行車專用道、路樹、建築物,甚至是交通路障和機器行人外,就連各種道路表面如柏油路、混凝土路等也一應俱全。此封閉場域從此成為自駕車封閉場域的典範,各國群起效尤模仿,此測試模式亦成為自駕車還無測試標準規範之前的最佳安全實驗場,若稱之為自駕車系統的教練場和考場亦不為過。
美國各州政府和廠商如火如荼的推動與發展自駕車時,2017年1月20日美國交通部發布在加州、密西根州及其他7個州設立共10座合法的官方自駕車測試道路場地[18],參考表1,供業者及研究人員研發測試之用,並可共享測試資料有助加速技術研發速度。這些試驗示範單位全部都擁有各種不同的設施,能夠用來測量自駕車的安全性,模擬各種道路與環境,並且適用於不同的車型。
表1 美國運輸部2017年公布的自駕車十大測試場地
| 所在地 | 場地所屬機構 |
1 | 賓州 | 匹茲堡市與Thomas D Larson賓州運輸學院 |
2 | 德州 | 自駕車試驗場合夥機構 |
3 | 馬里蘭州 | 美國陸軍Aberdeen測試中心 |
4 | 密西根州 | Willow Run園區的美國運輸中心(American Center for Mobility) |
5 | 加州 | Contra Costa郡交通局與GoMentum試驗場 |
6 | 加州 | 聖地牙哥政府協會 |
7 | 愛荷華州 | 愛荷華市區域發展集團 |
8 | 威斯康辛州 | 威斯康辛大學麥迪遜分校 |
9 | 佛羅里達州 | 佛羅里達中部自駕車合夥機構 |
10 | 北卡羅萊納州 | 北卡收費公路管理局 |
在各州政府競相提出各種法規協助廠商發展自駕車的同時,美國聯邦政府從2016年開始亦陸續發布指導政策:
2016年9月20日,美國交通部發布全球首個關於自動駕駛汽車的首項政策法規[1]。
2017年9月12日,美國交通部發布《自動駕駛系統2.0:安全願景》(Automated Driving Systems 2.0: A Vision for Safety)的自動駕駛開發指南。
2018年10月4日,美國交通部發布AV 3.0。
在前年推出的ADS 2.0後,許多廠商呼應了自我安全管理的政策,至2019年2月底已有Apple、Ford、GM 、Mercedes-Benz/Bosch L4-L5、Mercedes Benz L3、Navya、Nuro、Nvidia、Starsky Robotics、Uber、Waymo、Zoox等12家廠商公布其自駕車開發安全自評報告(VSSA-Voluntary Safety Self-Assessment)[19],如圖6。從這些報告可以看出各廠商對於自駕車上路實驗或車輛開發的願景及安全性都盡其可能地說明和自評,不但可解普羅大眾之憂慮,對科技研發者而言,不啻為一種技術分享和實力較勁。
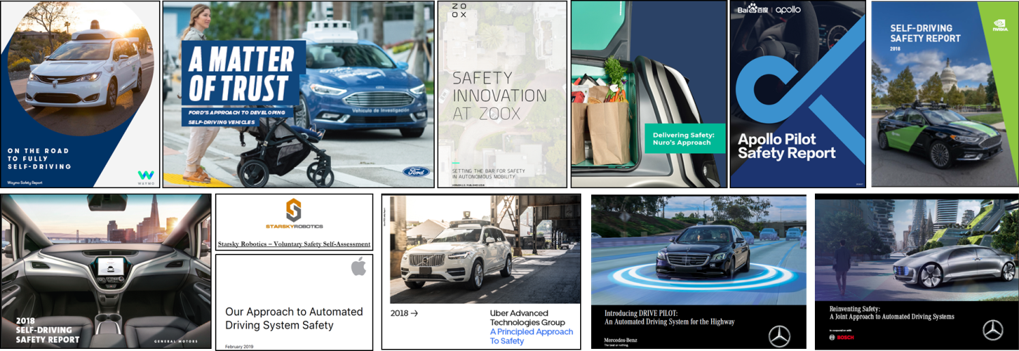
圖6 國際廠商發佈自駕車安全報告
在AV 3.0「自駕車3.0政策文件」聯邦政府提出六項自駕車政策原則:
1. 堅持安全第一(We will prioritize safety)。
2. 保持技術中立(We will remain technology neutral)。
3. 法令與時俱進(We will modernize regulations)。
4. 法令與環境一致(We will encourage a consistent regulatory and operational environment)。
5. 主動提前準備(We will prepare proactively for automation)。
6. 保障並增進自由(We will protect and enhance the freedoms enjoyed by Americans)。
當然,美國運輸部依舊認定先前提出之「安全願景2.0(A Vision for Safety)」[20]中之安全性架構,並鼓勵開發商持續遵循自願性之安全評估,亦重申將依循自我認證(self-certification)而非特定認證管制途徑,以促進規範之彈性。
特別的是AV 3.0[21]對於傳統駕駛汽車中所必要的方向盤、踏板、後視鏡等必要裝置,表明最新政策為:“針對自動駕駛汽車,交通部準備通過美國公路交通安全管理局(NHTSA)來重新考慮現行安全標準的必要性和適用性”。可見美國聯邦政府已經開始認真面對並相信無人駕駛(無方向盤的)車輛在公眾道路奔馳而來的那一刻即將到來了。
解析加州的自駕車實驗
藉由法規的制定和導引,自駕車上路實驗在美國各州如雨後春筍地出現,大大加快自駕車技術的發展。2014年9月加州頒布的有駕駛人在車上之自駕車上路實驗規範生效後[25],2015年開始便有7家廠商核准上路,從此,被核准的家數幾乎每年翻倍成長,2016年有11家,2017年到20家,2018年更高達62家自駕車(autonomous vehicle) [15],見圖7,歷年除了”Wheego”這一家之外,上路實驗的廠商都沒退出,見表2和表3,可見佐以上路實驗的法規,可大力導引科技創新之效果。
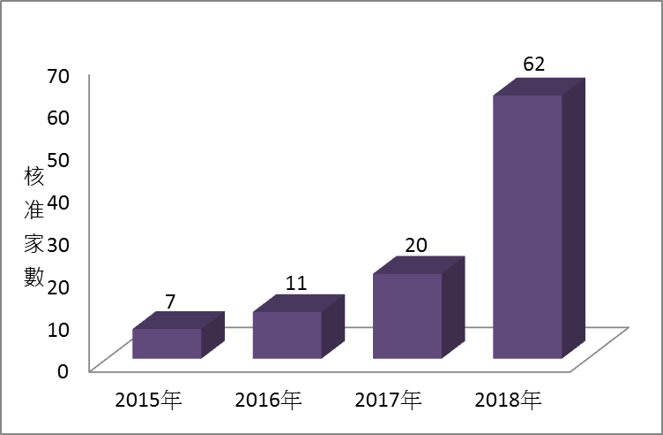
圖7 加州各年份核准自駕車實驗之數量
表2 加州2015-2017年核准自駕車上路實驗的公司
2015(7家) | 2016(11家) | 2017(20家) |
Bosch, LLC | Bosch, LLC | Bosch |
Delphi Automotive | Delphi Automotive | Delphi Automotive |
Mercedes-Benz | Mercedes-Benz | Mercedes Benz |
Nissan North America, Inc. | Nissan North America, Inc. | Nissan |
Tesla Motors, Inc. | Tesla Motors, Inc. | Tesla Motors |
Volkswagen Group of America | Volkswagen Group of America | Volkswagen Group of America |
Google Auto, LLC | Google Auto, LLC/Waymo | Waymo |
| BMW | BMW |
| Ford | Ford |
| GM Cruise | GM Cruise LLC |
| Honda | Honda |
| | Baidu USA LLC |
| | Drive.ai, Inc. |
| | Faraday & Future |
| | NIO USA, Inc. |
| | NVIDIA Corporation |
| | Telenav, Inc. |
| | Valeo North America, Inc. |
| | Wheego |
| | Zoox, Inc. |
表3 加州2018年核准自駕車上路實驗的公司獲准廠商(黑體字為2017年實驗的廠商)
AAA NCNU | Ford | Renovo.auto |
aiPod, Inc. | Gatik AI. Inc. | Ridecell Inc. |
Almotive Inc | GM Cruise LLC | Roadstar.Ai |
Ambarella Corporation | Helm.AI Inc | SAIC Innovation Center, LLC |
Apex.Al | Honda | Samsung Electronics |
Apple Inc. | Imagry Inc. | SF Motors Inc. |
Aurora Innovation | Intel Corp | Subaru |
AutoX Technologies Inc | Jingchi Corp | Telenav, Inc. |
Baidu USA LLC | Lyft, Inc. | Tesla Motors |
BMW | Mando America Corporation | ThorDrive Inc |
Bosch | Mercedes Benz | TORC Robotics Inc |
Boxbot Inc | Navya Inc. | Toyota Research Institute |
CarOne LLC | NIO USA, Inc. | TuSimple |
Changan Automobile | Nissan | Udacity, Inc |
Continental Automotive Systems Inc | Nullmax | Valeo North America, Inc. |
CYNGN, Inc | Nuro, Inc | Volkswagen Group of America |
Delphi Automotive | NVIDIA Corporation | Voyage |
DiDi Research America LLC | Phantom AI | Waymo LLC |
Drive.ai, Inc. | PlusAi Inc | Xmotors.ai, Inc. |
EasyMile | Pony.AI | Zoox, Inc. |
Faraday & Future Inc. | Qualcomm Technologies, Inc. | |
加州DMV( Department of Motor Vehicle, 機動車輛管理局)訂有三類自駕車測試許可証:有安全駕駛員的自駕車之公共道路測試許可証、無安全駕駛員的自駕車之公共道路測試許可証、佈署(deployment, public use)自駕車之許可証。依第1類及第2類獲許可証之企業,每年1月1日前必須向DMV繳交前年12月至去年11月之自駕測試車輛的脫離報告(disengagement report)。DMV於今年(2019)一月底公佈了完整的報告資料。48家企業總共報告了496輛自駕車,以自駕模式行駛了約326萬公里,共發生143,720次脫離事件,平均22.7公里發生一次。48家企業中,實驗車輛超過5台且有提供脫離次數者的實驗數據,整理於表4。
Waymo的果然是自駕技術的領導廠商,2018年在加州以111輛自駕車,行駛203萬公里,只發生114次脫離事件,平均17,847公里才發生一次,在平均脫離里程方面獨佔鰲頭,領先第二名的GM Cruise一倍以上(162輛,72萬公里,86次,8,328公里/次)。
去年3月發生致死事故後即停止在加州測試的Uber公司,其平均脫離里程則墊底(29輛,4.3萬公里,70,165次,0.6公里/次),去年首次上路實驗的Apple公司,同樣令人意外,平均脫離里程與Uber相近(62輛,4.3萬公里,70,165次,0.6公里/次,12.8萬公里,69,510次,1.8公里/次)。
新創而訴求物流配送的Nuro公司,以及,新創的Zoox公司,在平均脫離里程數表現不俗,各為1,645公里/次和3,076公里/次,參考圖8.
表4 實驗車超過5台的企業之測試里程等數據
| | 車輛數 | 總實驗里程(km) | 每車均里程(km) | 脫離次數(次) | 脫離前里程(km/次) |
GM Cruise | 162 | 716194 | 4421.0 | 86 | 8327.8 |
Waymo | 111 | 2034539 | 18329.2 | 114 | 17846.8 |
Apple | 62 | 127592 | 2057.9 | 69510 | 1.8 |
Uber | 29 | 43038 | 1484.1 | 70165 | 0.6 |
Drive.ai | 13 | 7387 | 568.2 | 55 | 134.3 |
Nuro | 13 | 39488 | 3037.5 | 24 | 1645.3 |
Zoox | 10 | 49222 | 4922.2 | 16 | 3076.4 |
NVIDIA | 7 | 6627 | 946.7 | 206 | 32.2 |
AutoX | 6 | 36336 | 6056.0 | 119 | 305.3 |
Pony.AI | 6 | 26170 | 4361.7 | 16 | 1635.6 |
Aurora | 5 | 52573 | 10514.6 | 329 | 159.8 |
BMW | 5 | 66 | 13.2 | 9 | 7.3 |
WeRide/Jingchi | 5 | 24705 | 4941.0 | 89 | 277.6 |
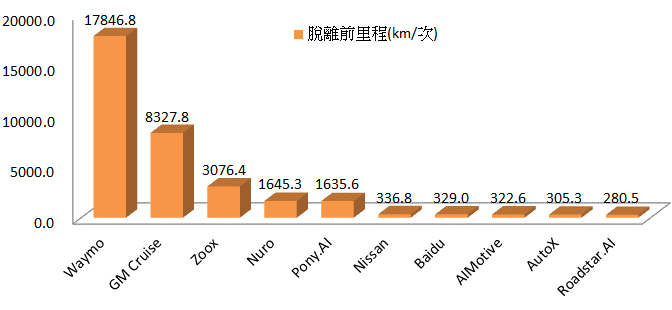
圖8 2018年在平均脫離里程表現較優的前10家企業
千錘百鍊的Waymo-從虛擬、模擬,走到真實世界的實驗
從2004年3月DARPA第一次發起無人駕駛挑戰賽算起,經過10年,Google在2014年底發表雙座無方向盤自駕車雛型時,眾人仍半信半疑於自駕車能否上路時,才短短的4年,自駕車技術大躍進。
從google分出來的Waymo 在2017年11月28日發布其無人自駕總里程已突破400 萬英哩, 2018年7月21日再次宣布其路測里程已達800萬英里,未幾,2018年10月已達到1000萬英里。從官方公佈的里程累積節奏來看,其第一個 100 萬英里歷經 6 年,第四個 100 萬英里僅用了 6 個月,而第 5個 100 萬英里,更僅用5 個月時間便全部完成。其實在2018年3月, Waymo 一天的自動駕駛行駛里程已經相當於一個美國成年人一年的駕程。
Waymo想要達到完全自駕(Fully Self-Driving, Level 5)的歷程,在2017年10月公布的安全報告裡[22], Waymo揭露了他們是如何去做到的。
Waymo指出三段式的作法:
模擬測試(simulation Testing): Waymo以超過25000台的虛擬車輛模擬了超過800萬英里的里程,CEO 約翰·克拉弗西克(John Krafcik)2018年10月還透露[23],在模擬世界當中的自動駕駛里程數即將在當月底突破70億英里。Waymo用模擬測試重現在路上會遇到的任何狀況,還練習極為罕見的環境和遭遇,終而不斷考驗並改善自動駕駛軟體。
封閉場域測試(Closed-Course Testing):Waymo在加州建置一處被其暱稱為”城堡”的91英畝(36.8公頃)專用封閉測試場,內部設施就像一個城市,包括高速公路、郊區車道及鐵路平交道。 Waymo並搭建具有挑戰性的亦或是罕見的駕駛情境,以便獲得所需的駕駛經驗。為了幫助模擬器取素材,Waymo在”城堡”内設置了2萬多個模擬情境。
實路場域測試(Real-World Testing):該報告指出在過去的8年中,Waymo在美國六個州的25個城市執行自駕路測,測試里程已超過500萬英里(備註:2018年10月則破了1000萬英里)。Waymo每到一個新地方測試,就可以獲得多種不同道路環境、氣候、街景、當地居民移動方式和駕車習慣甚至對自駕車的觀感。
Waymo以強大的三段式測試達到目前執自駕車牛耳的地位,經歷70億英里的模擬測試,2萬個場景的封閉場域測試,1000萬英里的實路測試,還有嚴謹的實驗紀律,才能締造2017年在加州總測試里程352,544英里僅有63次系統撤手的問題,其中的24次偵測失敗而由人工接手的操作多能在1秒左右成功掌控[24]。
從Waymo公司歷年在加州提報的自駕系統脫離報告來看,參考表5,測試規模及平均脫離里程均處於領先地位, 4年來Waymo投入測試的車輛數量擴張了將近一倍,2018年平均每車測試里程達18329公里,已近乎台灣一般開車族一年的的行車里程了,平均每車才發生一次的脫離情況,平均脫離里程增加將近8倍,來到17847 km/次,等同於台灣開車1年才出現一次系統脫離事件。
表5 Waymo歷年測試績效比較表
| 車輛數 | 脫離次數 | 行駛里程 | 每車平均里程 | 每車平均脫離次數 | 平均脫離次數 | 平均脫離里程 |
(輛) | (次) | (km) | (km/車) | (次/車) | (次/萬km) | (km/次) |
2015 | 57 | 341 | 682,895 | 11,981 | 6.0 | 5.0 | 2,003 | |
2016 | 60 | 124 | 1,023,330 | 17,056 | 2.1 | 1.2 | 8,253 | |
2017 | 75 | 63 | 567,366 | 7,565 | 0.8 | 1.1 | 9,006 | |
2018 | 111 | 114 | 2,034,539 | 18,329 | 1.0 | 0.6 | 17,847 | |
增進幅度 | 195% | 299% | 298% | 153% | 583% | 891% | 891% | |
| | | | | | | | | | | |
工研院ADV的研發概況
工研院自駕車技術研究起於2015年底,感知系統從Vision-Based發展到Lidar-Based而到目前的多重異質感測融合。實驗車係以過去科技專案計畫研發並已累積30餘萬公里驗證里程之電動動力系統的客貨兩用商用車為基礎平台,參考圖9,電控轉向系統則採長傑公司生產的電助轉向系統升級,電控剎車則為自行改造加裝的真空輔助泵浦直推伺服系統,與剎車踏板平行作動而不聯動,在緊急狀態下駕駛者可直接踩踏原踏板取得剎車權並取消電控剎車。
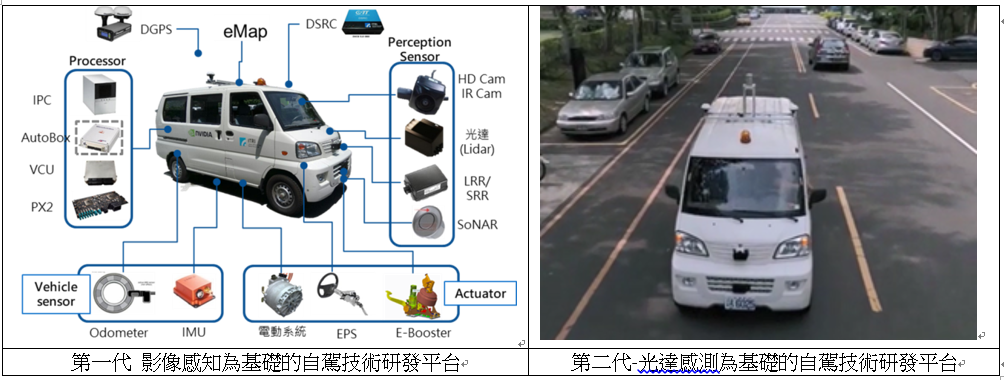
圖9 工研院機械所自駕車技術研發平台與架構
實驗車的人機操作安全措施除前述的扭力感應的電控轉向及踏板壓踏感應的電控輔助剎車系統之外,在駕駛座前裝設有強迫自駕系統退出的緊急按鈕,此外,旁邊的偕同實驗者亦可從從控制器鍵盤直接取消自駕功能並以鍵盤操作車輛,不但如此,我們亦曾以遙控器操控車輛,這對於無人車的實驗是極有用的利器。
自駕實驗對於內部人員的保護措施要完備,對外部他人的保護除保險之外,也積極的裝設一些對外警示的措施,以便在實驗沿途清楚地對外車與人有所警告,例如本實驗車外的貼紙、車頂閃燈、車後窗的走馬燈字幕等,以便對外表達自駕車處於實驗狀態。參考圖10。

圖10 自駕測試車輛外部警示裝置及其三視圖
操作SOP之制定是執行自駕車實驗極重要的環節,工研院制訂一份自駕車實驗的工作指導書,除了車子相關安全措施的規定之外,還定義車內外實驗者的職掌與資格、上路測試前的檢核、駕者操控人員的相對車種駕照,還規範操駕者必須接受過自駕車基本知識的以及特殊操駕訓練並取得合格證明,以及,事故緊急處理流程和通報程序。這一切只為了上路實驗更安全。
自駕車路試一直在新竹中興院區內進行,測試皆以低速為之;國內之前尚無標準封閉場域,更無測試自駕車功能的專用測試場,工研院中興院區足以進行低速域的自駕車諸多功能之測試與驗證甚至體驗。本院區面積約30公頃,各主要道路總長約3公里,速限為30公里,內有各種路型和路口,路邊和路面有各種交通標誌和標線、人行道、林蔭、夕照、路燈、停車場、室內車道和停車場等,還有各種交通狀況,諸如行人穿越或併行、路邊暫停、人車及機慢車混流、各種車輛穿梭、交通指揮等,尚屬多樣情境並可供自駕功能測試的環境。參考圖11。在視覺偵測及人工智慧辨識技術開發過程,則不限於中興院區,為建立多樣的訓練資料庫,相關實驗亦常於一般道路以駕駛者操駕車輛執行之,如圖12所示。

圖11 工研院中興院區道路狀況與部分情境
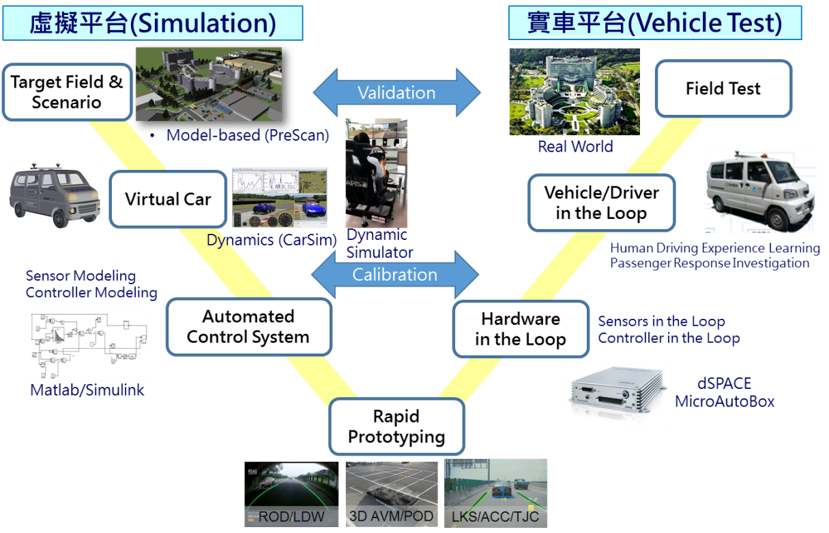
圖12 工研院自駕車技術研發之驗證流程
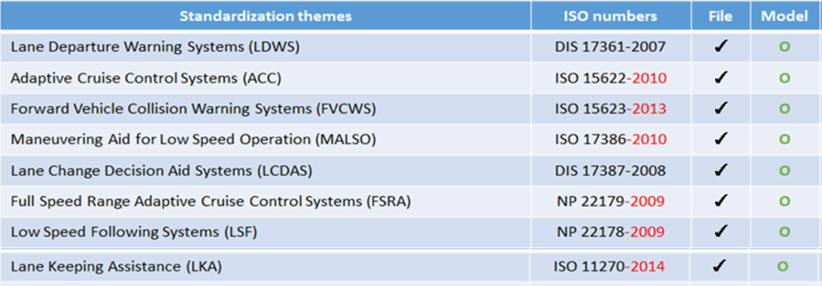
藉由PreScan模擬軟體將中興院區的道路、路邊景物和建物以模擬軟體重現,感知軟體可以藉此輔以模擬和虛擬驗證之,利用PreScan可設計多種天候與路況進行模型在環(MiL)或硬體在環(HiL)的測試。本團隊並購入ISO相關ADAS規範,也建置於PreScan模擬軟體,可以模擬自駕車的相關功能,如圖13及表6所示。
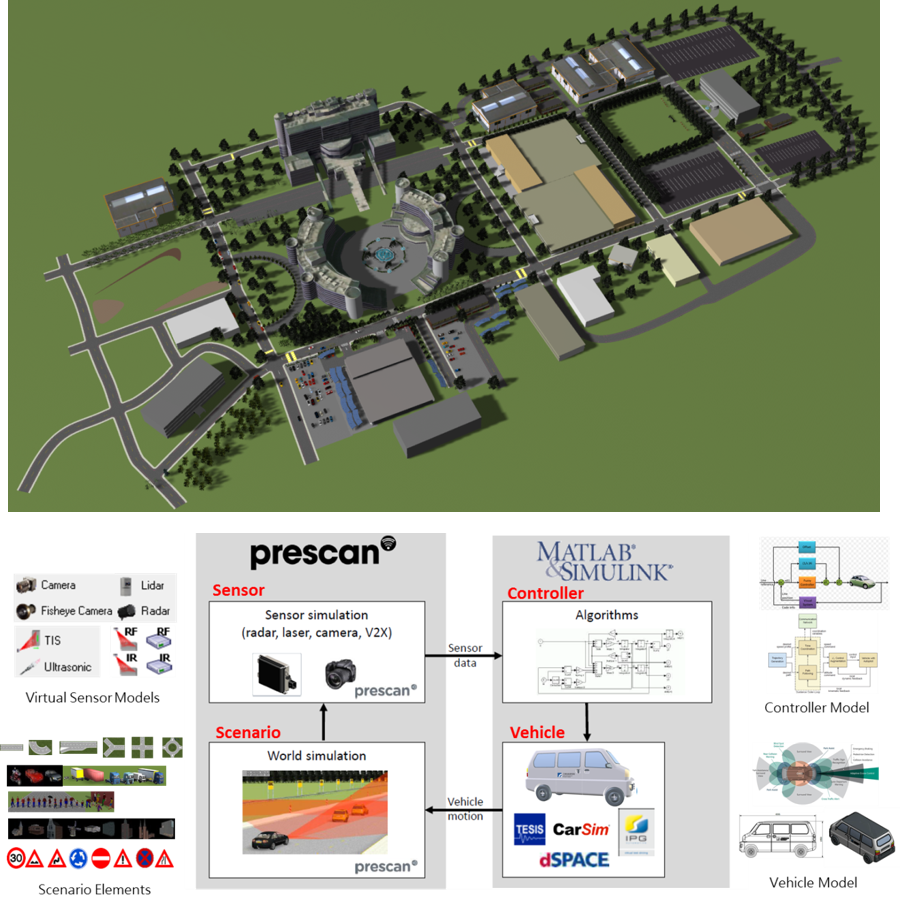
圖13 工研院的虛擬驗證系統與場域,車輛,情境,工況等模型及運作流程
表6 本所已建置之ISO相關ADAS規範的虛擬模擬情境
在中興院區的低速(< 30 km/h)自駕路試里程亦累積超過1500公里以上,實車在實路測試多種自駕功能,包括定速巡航、適應性巡航控制、防撞緊急剎車、道路標線跟隨、路口停止線停走控制、路凸緩速跨越再走、尋格自動停車、指定點停車載人、以及持續精進的SLAM技術等技術,參考圖14。此外,在一般道路人工駕駛的感測實驗亦快速持續累積中。這一切,就是循美國VSSA(安全自評報告)的精神以及ODD(Operational Design Domain自訂操作限度)的實驗原則在累積”自駕安全”的能力,經由逐步建立的自駕能量將在未來持續轉移給國內產業運用。

圖14 自駕車在實路測試了多種自駕功能
結論
根據美國NHTSA建議的自駕車28項行為核心能力自評表,以及Waymo增列的19項[23],自駕車要被實現還有很多事要做,況且,台灣道路交通環境又與美國極大的不同,甚至更複雜,所以,自駕車要由Lv3邁向Lv4甚至於Lv5的過程還要克服很多挑戰。
台灣自駕車要上路實驗,無論是政策面、法規面、測試場域發展、道路交通設施、以及林林種種的科技研發與驗證,我們還有很多事要做。因產業發展策略、道路交通狀態和差異甚大的民情,我國自駕車政策或無法與美國相提並論而完全比照AV 3.0或ADS 2.0,但,循《無人載具科技創新實驗條例》展開上路實驗的同時,應當持續在法規修訂、技術研發、產業發展上與時俱進、滾動發展。
從事自駕車技術研發或產品開發者依然可以保持VSSA的精神,設定合理的ODD,在科技監理沙盒下精進自駕車技術以帶動台灣產業,向國際市場拓展自駕車相關商機。