- 回首頁
- 機械工業雜誌
- 歷史雜誌
摘要
本文針對大型六軸多旋翼無人機系統在電推槳模組配置進行說明,並介紹整機功耗監測系統架構與實測數據,透過此狀態監測模組可在調機測試時協助分析起飛、懸停、側傾抗風、巡航等情況下,整機最大、最小與平均功耗,藉由整機重量與平均功耗計算出旋翼無人機力效比,透過力效比可計算出準確的續航時間,而旋翼無人機搭配不同種類電池,其放電特性也會影響到飛控參數調整,預期本監測技術可輔助提升調機後的系統穩定性。
Abstract
This article describes configuration of the electric propeller module for a large six-axis multi-rotor UAV system, and introduces the overall power consumption monitoring system architecture and measured data. This status monitoring module can assist in the analysis of take-off and suspension during the adjustment test. The maximum, minimum, and average power consumption of the whole machine under the conditions of stop, rollover, wind resistance, and cruise will be shown. The power efficiency ratio of the rotor UAV is calculated by the weight and average power consumption of the whole machine, and the accurate endurance can be calculated through the power efficiency ratio. However, the discharge characteristics of the drone with different types of batteries will also affect the adjustment of the flight control parameters. It is expected that this monitoring technology can assist in improving the system stability after the adjustment.
前言
無人飛行載具,簡稱無人機,於過去的十年間快速的發展,也造就不少經濟上的貢獻。無人機根據本身的飛行結構可以將其分類為使用固定翼、旋轉翼或混和固定翼以及旋轉翼構型做為主要的動力來源。以目前的發展來看,軍事所使用的無人機大多為固定翼設計,而商用及娛樂用的無人機則是以直升機型以及四至六支螺旋槳的多旋翼無人機設計為主。
目前台灣大多將無人機與空拍機混為一談,起因為在一般消費型無人機機種的應用中,透過多旋翼無人機進行空拍以及藝術創作為大宗,其次的應用則是透過無人機進行探勘與偵測。自從去年三月三十一日起,隨著台灣無人機管理專法的啟動,以往對於法規尚未限制的消費型無人機飛行區域僅可在受限制的區域進行飛行,透過此次專法的啟動,也間接的讓無人機產業大步的向商業服務邁進,讓台灣無人機市場邁入嶄新的一步。而在各國法規及新興商業模式下,成長最為顯著的商業應用領域包含農業植保業務、空拍影片、無人機展演等,未來在無人機遞送服務將會是帶動交通與倉儲物流的發展變革,另外基礎設施也開始採用無人機執行空中巡檢,以強化設施/設備的日常運作及安全管理工作。
大型多旋翼無人機設計要點
無人機由機架、飛行控制器、電子調速器、馬達、槳葉、遙控器、電池所組成。若需要進行自動飛行(路徑規劃),尚需要定位系統以及地面導控站(也可以使用手機或是平板代替,直接透過手機應用程式進行任務規劃)。多旋翼無人機在小型或是超大型的基本硬體架構都相同,但除了遙控器以及飛行控制器,其主要的硬體規格,在大小型多旋翼無人機上有著顯著的差異,比如在馬達上就有航拍、物流、植保、載人等等的不同級距,所以需要花上大量的研究及實驗測試才能開發出一架大型的無人機。
無人機的核心技術集中在機架系統、動力系統和飛行控制器系統,由這三個系統可以知道無人機系統可以達到的飛行高度、航程距離、航時、航速、載重等技術資料。飛行控制器方面,採用的是開放性的Pixhawk [1]硬體架構,Pixhawk [1]是同時間可以適用於固定翼、多旋翼和直升機,船舶、車輛以及一切其他可移動的機器人架構。Pixhawk [1]採用了ST先進的處理器,同時可以選擇搭載NuttX/Chibios [2][3]實時作業系統。
Pixhawk硬體主要特徵如下:
1)使用32 bit STM32F427 Cortex-M4F® core with FPU,256 KB RAM
2)具有32 bit STM32F103 failsafe co-processor
3) 14 路PWM / Servo 輸出
4)具有冗餘電源設計,可透過兩組電源輸入確保飛控供電正常
5) 飛行控制器架構包含9軸傳感器以及氣壓計
無人機飛行控制器的架構如圖 1所示:
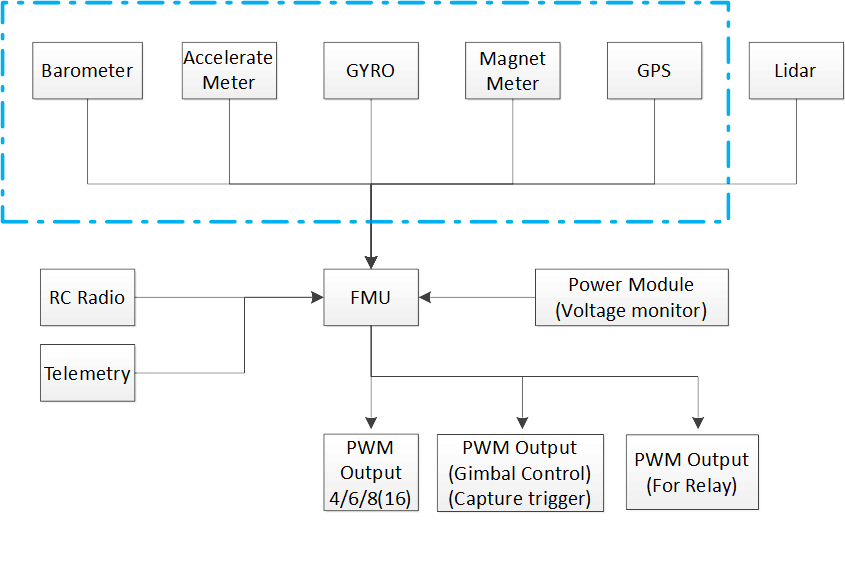
圖 1 飛行控制器架構圖
在動力系統方面,需要先了解整體無人機所需要的載重與續航時間,以利進行馬達與槳葉最佳化的配比以及電池種類選用,首先透過整機動力需求分析將馬達及槳葉進行不同配對,再由槳葉拉力台測試,以同樣馬達不同尺寸槳葉比較或是不同規格馬達同樣尺寸槳葉去進行比較分析,最後得到最佳化組合數據,圖 2為在選用同樣馬達不同尺寸槳葉時,實際拉載後所能提供數計分析之資料,圖 3為在選用同樣馬達不同尺寸槳葉時,實際拉載後所能提供數計分析之資料。
根據圖 2與圖3可以看出馬達與槳葉的搭配上,分別在拉力及功耗的增加有不同的趨勢,透過數據比較分析,在得知無人機總起飛重量與多旋翼設計葉槳分佈,可以得知預計每組馬達在懸停時所需的拉力值為多少,採用不同的槳葉是否有較佳的功耗數據。當六旋翼無人機的總起飛重量在102 kg時,平均至各個馬達拉力為17 kg,搭配43吋槳葉時的功耗約為2,800 W,而採用47吋槳時的功耗約為2,200 W,一航而言,電推槳油門值落在50~60 %對於無人機是較佳的控制區域,綜合上述在拉力功耗、油門值數據考量下,本案例無人機槳葉以搭配47吋槳較佳。
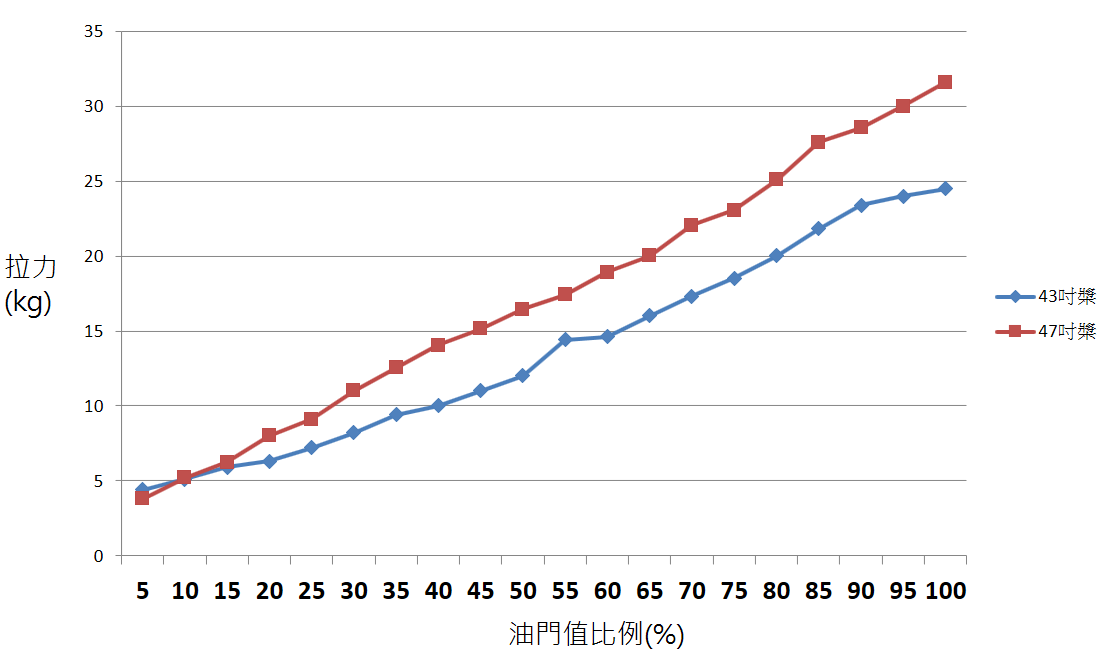
圖 2 馬達與槳葉拉力測台實驗數據
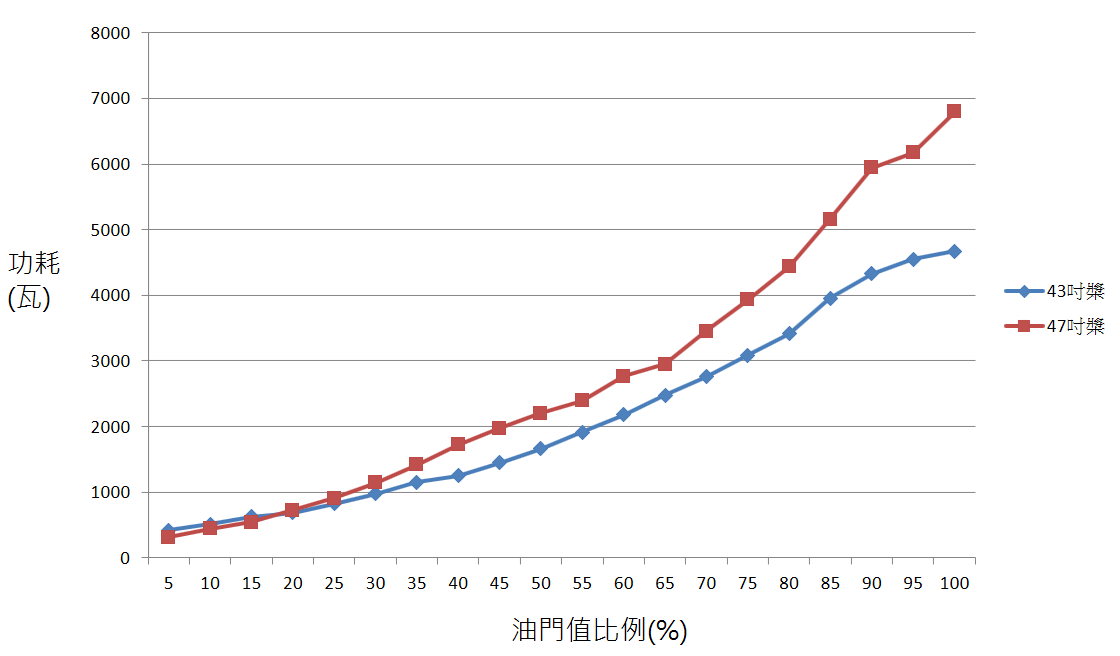
圖 3 馬達與槳葉拉力測台實驗數據
回文章內容列表更完整的內容歡迎訂購 2021年07月號 (單篇費用:參考材化所定價)